数式を使わないで自動制御について教えるよ:独学! 機械設計者のための自動制御入門(1)(3/3 ページ)
制御の本には数式がいっぱい出てきます。それで制御理論の習得に挫折した人は多いように思います。
専門的に理解しようと思えば微分方程式の知識が必要ですが、制御のエッセンスだけなら数式がなくても理解できます。制御理論には微分方程式を主体として制御系を設計する現代制御理論と周波数応答で設計する古典制御理論がありますが、周波数応答理論であれば数式を使わずに説明できるので、数学の不得意な人も感覚的に理解できるのではないでしょうか。

それはいいね

まず、自動制御の基本となるフィードバック制御の基本構成は図3である。このことはいいよな
問題なし!
じゃあフィードバックシステムにおいて重要な基本特性は、なんだと思う?
なんだろうな。制御対象を上手にコントロールできることかな?

また小学生レベルの回答だな、オイ。上手にコントロールするって、どういうことよ? 例えば図4のようなレーシングゲームで車を制御する場合で説明してみてみぃ
 図4 レーシングゲーム
図4 レーシングゲーム 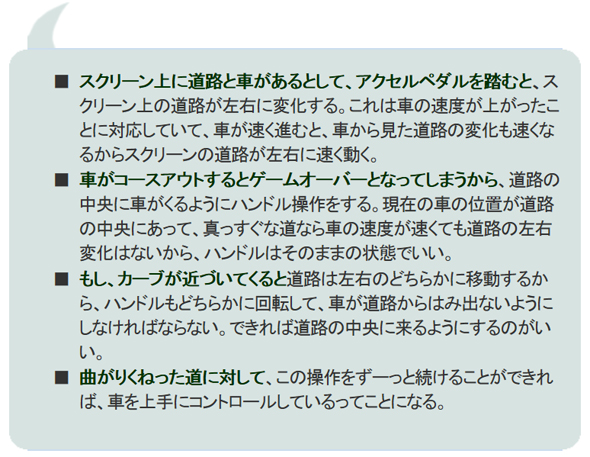
まぁ、そんなところだけど、車の走行スピードによってハンドルの操作特性はどう変わると思う?
ゆっくり走っているんなら、ハンドルもゆっくり動かせばいい。でも速く走っている場合にはハンドル操作も速くしなければならないかな?
そうだな。同じ曲率半径のカーブを通過する場合でも、走行スピードによってハンドル操作も変える必要があるね。逆に、同じ走行スピードでも道路の曲率半径が短いとスクリーン上の道路の左右の変化は速いから、ハンドルも速く回さなければならない。つまり、ハンドルの操作の良し悪しが重要なポイントになってくるってことが分かるね
運転手の運動神経が問題となるんだね。それに、ハンドルを動かすためのパワステ自体の性能も問題となってくる。そうか、上手にコントロールできるためには運転手を含めた操作部や制御対象の応答性が重要なんだ
そうだ。図4のレーシングゲームにパワステの特性や、ハンドルの遊びが考慮されているかどうか知らんけど、実際の車の運転では、ハンドル操作をしようと思った瞬間から、実際にタイヤの向きが変わって車が道路の中央の位置まで移動するまでに時間がかかる
うんうん
つまり、必ず遅れが発生する。自動制御で問題となる特性の1つがこの遅れだ。逆に遅れが小さいことを、応答性が良いとか、高いとかいうね。これら応答性のことを別のことばで「動特性」ともいう
動特性があれば『静特性』もある

そのとおり!
あ、『静特性』って、何?
おいおい。知らんといっとんたんかい……
静特性というのは、制御対象が目標値にどのくらい近づくことができるか、という性能のことです。フィードバック制御をすれば、必ず目標値に到達するというものではありません。なぜ、目標値に到達できたりできなかったりするかは、おいおい説明していきますが、この「静特性」が「動特性」と並んで、非常に重要な特性であることは誰でも理解できるでしょう。
なるほどね。でもなぜ、目標一致特性と呼ばずに「静特性」と呼ぶんだろうね
さっきちょろっといったけど、自動制御系を設計する手法には、操作部や制御対象の周波数特性を活用して設計する方法と、微分方程式の理論を使って設計する2つの方法がある。目標に一致するかどうかという性能は実は、低周波数域の周波数特性に関係しているんだ。
低周波領域……の
低周波域というのは、非常にゆっくりとした運動領域のことでその極限は停止を意味している。だから低周波数域の周波数特性に依存する特性を「静特性」と呼ぶんだ。反対に、応答性は高周波域の運動特性に関係しているんだよ

あー、そんなわけ分からんことばっかいい出したら混乱するよー
そのうち分かってくるさ。今は、とにかく、静特性というのは目標と一致できるかどうか、という特性と理解しておけばいいさ。……実はもう1つ、フィードバックシステムで最も重要な特性があるんだけど知ってるかい?
知ってるよ。安定性でしょ?
おぉ! なんで知っとん?
実は、授業についていけなくなった理由はラプラス変換と、この安定性の理屈がよく理解できなかったからさ。だからその名前だけは良く覚えているんだ
なるほどな。単位を落とす原因を作った、にっくき相手の名前は死んでも忘れん、というやっちゃな
フィードバックをするとシステムがなぜ不安定になるのか、その理屈がさっぱり分からんかったのよ。で結局、単位が取れんかった
フィードバック制御において重要な特性は、安定性、静特性、動特性の3つです。この3特性を周波数特性との関係で理解できれば、数学的な知識がなくても、PID制御、位相遅れ補償や位相進み補償など基本的な制御設計を、誰でも簡単に行うことができます。
そして、3つの特性の中で特に重要なのが、安定性です。システムが安定でなく不安定であれば、そもそも静特性や動特性はなんの意味をもちません。従って、フィードバックシステムの制御設計においては、まず、安定であるかどうかを確認することが最初の設計課題となります。
一般に、目標値と現在値との差が大きい場合、システムの状態を目標値に早く近づけたければ、コントローラーのボリュームを上げればよいと考えがちです。
例えば、車が道路の中央から大きく外れているならば、それに比例してハンドルを大きくきったり、浴槽の水位が目標水位よりはるか下にあるならば、その差に比例した流量で水を入れればよいと考えます。もちろん、そのような制御で問題ない場合もありますが、一般には目標値と現在値との差、つまり偏差に比例した操作量を大きく与え過ぎるとシステムの安定性が損なわれるという問題が起きます。
この安定性という問題は、シーケンス制御には出てきません。フィードバック制御で発生する特有な問題なのです。
◇
次回から、フィードバック制御の三大特性について1つ1つ考えていくことにします。最初は、この安定性について考えてみます。

Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。