静特性を取るか、動特性を取るか。それが問題や:独学! 機械設計者のための自動制御入門(11)(1/4 ページ)
直線走行だけではなく、車線変更や交差点での右折、左折もある。車が車線変更するときの応答性の制御について解説。
当連載の登場人物

銀二(ぎんじ)
設計コンサルタント。甥(おい)っ子の草太を自分の息子のようにかわいがっています。

草太(そうた)
銀二の甥。現在は大学院生です。ちょっと困るとすぐ叔父を頼ってしまうちゃっかり者だけど、頑張り屋さんです。
前回までは、強風の中を車を真っすぐに走らせる自動走行制御システムを例題として、始めにP制御、次に積分要素を加えたPI制御、そして最後に微分要素を加えたPID制御について、それぞれの制御性の特性や特徴を比較しながら説明して来ました。各制御方法の説明において共通していたのは、開ループシステムのボード線図のゲイン曲線と位相曲線の形状が、閉ループシステムの静特性、動特性に影響を及ぼすということです。簡単に言えば、安定性は位相余裕やゲイン余裕、静特性は低周波数のゲインの大きさ、動特性はカットオフ周波数の大きさで決まる、ということです。そして、このことが正しいことを、シミュレーションによって検証してきました。
ところで、自動走行制御システムに要求される機能は、強風の中を真っすぐ走行させることだけではありません。車線変更や交差点での右折、左折もあります。車線変更性能において、車が車線変更するときの応答性が、各制御でどのように違うか、シミュレーションによって確認したいと思います。
また、前回、連載当初実験で求めたと説明していた車のステアリング特性が、実は計算で求めることができると説明しました。今回このことについても詳しく説明したいと思います。
前回から、少し年月が経過します……。
草太、ついに
ここは、瀬戸内海の風かおる、銀二さんの書斎。仕事が一段落し、一息ついていると、銀二さんの携帯電話のベルが鳴りました。
もしもし……?
叔父さん、元気? 草太だよ。
おぉ、久しぶりやな。お前こそ元気にしとるか?

就職が決まってね。いま、関西の某会社の独身寮から電話してるんだ。

おぉ、そうか。それはおめでとう。
ありがとう。独身寮から叔父さんの家とは電車で2時間ぐらいの距離だから、前より行きやすくなったよ。まだ新入社員だから大した仕事は任せてもらえないと思うけど、叔父さんのおかげでPID制御ってものがどういうものであるか分かったから、いつか機会があったら仕事でPID制御を使ってみたいと思ってる。そのときは、また相談に乗ってね。
分かった。早く一人前になれよ。
ところで、いままで教えてもらったことで、2つ気になっていることがあるんだけど……。今度の土曜日に聞きに行ってもいい?
ええで。
また草太がやってきた
そして土曜の朝、銀二さんの家のインターホンから聞き覚えのある声が……。
こんにちは。叔父さんいる?
おぉ、草太か。よう来たな。まぁ、あがれや。
銀二さんの書斎から久しぶりに眺める明石海峡の海。初夏の日差しに照らされて、水面がキラリと光ります。
しばらく草太の近況についての話が続いた後のことです……。
……で、電話で言っていた、聞きたいことってなんや?
いきなり本論に入る前に、自分の理解に誤りがないか確認を求めるように、制御の全体像について草太なりの理解の内容について語り始めました。
図1の制御対象Gの周波数特性が分かっていれば、数式を使わないでも、ボード線図を使って制御設計ができると説明してきてくれたよね。
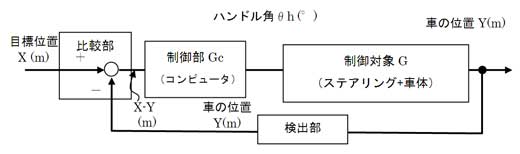 図1 自動運転制御の基本構成 1
図1 自動運転制御の基本構成 1“数式を全く使わない”ってのは無理やけど、P制御、PI制御、PD制御、PID制御のボード線図を描くための簡単な数学が理解できれば、後はボード線図上での操作だけだから、制御対象を微分方程式で表現できなくてもいい、って言ったな。
そして、制御対象Gがステアリングと車体を含めたものである場合、Gの周波数応答は図2のような方法で求めることができるって第3回のときに説明してくれた。しかし簡単にできる実験じゃないよね。だから、図3のように制御対象GをステアリングGstと車体GBに分けて、それぞれの周波数応答を求めて、それらを合体してGの周波数応答を求めたんだよね。
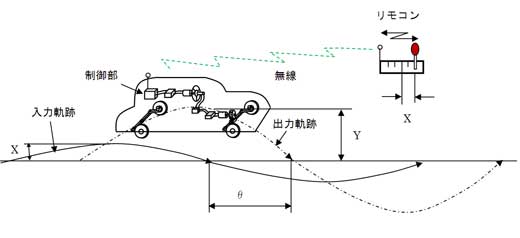 図2 自動車の周波数応答特性計測
図2 自動車の周波数応答特性計測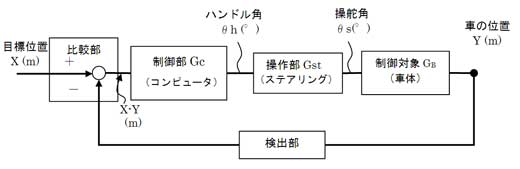 図3 自動運転制御の基本構成 2
図3 自動運転制御の基本構成 2そうや。車全体の伝達特性を、いちいち図2の方法で調べるのは大掛かりで大変だけど、車のステアリングの周波数特性Gst(伝達関数)は図4の方法で求めることができる。図2の方法よりは簡単やろ。
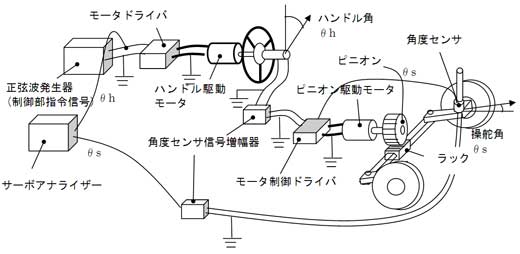 図4 ステアリングの周波数応答特性計測装置
図4 ステアリングの周波数応答特性計測装置それは分かるんだけど、ステアリングGstと車体GBの実態がぼやけていて、今一はっきり分からないんだよね。前回、図4に示す方法で求めたと叔父さんが説明していた車のステアリング特性Gstが、実は計算で求めることができ、そのことは後で説明すると叔父さんが言ってたのを思い出して、今日はそのことについて聞きに来たんだ。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 使用中に発火、サーキュレーター10万台をリコール
- 【レベル14】生成AIを味方に、3D CADを使いこなそう!
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 最大0.03mmの精度、黒色/光沢素材にも対応する4モード3Dスキャナー
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。