静特性を取るか、動特性を取るか。それが問題や:独学! 機械設計者のための自動制御入門(11)(4/4 ページ)

確かに、正しくはステアリングがタイヤの操舵角度を制御し、タイヤの操舵角度が車体の旋回角度を制御するんやけど、いまここで説明した内容を、制御を学び始めた初心者にいきなり説明しても複雑すぎて分からへんと思ったんや……。
ステアリングがタイヤの操舵角度をコントロールするというのは自然で分かりやすいから、理解が深まるまでは、タイヤの回転角度(操舵角θs)=車体の旋回角度θBとして、話を単純化して説明してきたわけよ。まさか、草太が、タイヤの回転角度(操舵角θs)と、車体の旋回角度θBが違うもんやと気が付くとは思わへんかったし……。

なるほど、そういうことだったのか。ステアリングと車体の伝達特性の本当の実態がよく分かったよ。
気になることが2つあるっていっとったけど、もう1つは何やねん?
いままでずーっと、強風が吹いたときの直線制御ばかりだったけど、車線変更やカーブの制御の場合も、前回求めた同じPIDパラメータの値で制御すればいいのか、それともあらためて制御設計をすべきかということを知りたいんだ。

いまさら何言ってんねん。第8回のとき、図15のブロック図を図16のように書き換えて考えればいいといったのは草太やで。
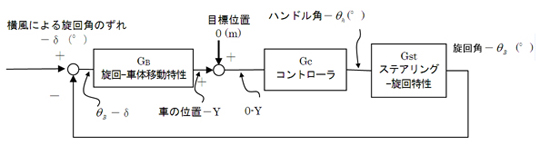 図16 横風を受けるときの旋回角のずれを目標値とする自動走行制御システム
図16 横風を受けるときの旋回角のずれを目標値とする自動走行制御システム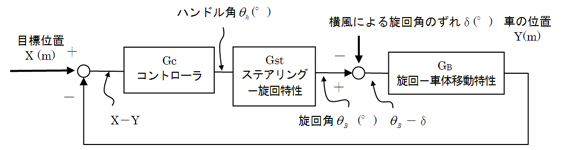 図15 横風を受けるときの正しい自動走行制御システムの構成(再掲)
図15 横風を受けるときの正しい自動走行制御システムの構成(再掲)そうか。すると、要素ブロックの順番が異なるだけで、δ=0としたときの図15と、図16の開ループ伝達関数は同じだから、車線変更制御の場合の安定性、静特性、動特性のいずれも同じということだね?
そうや。しっかりしてや。鋭いんだか、抜けてるんだか……、どっちやねん!
車線変更制御シミュレーション
前回設計したPID制御に対して、車が車線変更したときのシミュレーション結果をアニメーションで紹介します。時速40km/hで、2車線の道路の片側を直進走行している車が、途中で「車線変更せよ」という無線信号を受けて、隣の車線に変更するという設定です。1車線の道幅は5mです。
アニメーション1は、前回設計した、コントローラーの補償制御パラメータに対してシミュレーション結果です。車線変更直後は、車は道路中央から少し行き過ぎてしまっていますね。
それに対してアニメーション2は、Kpを12から10に、KIを2から0.5に変更した場合のシミュレーション結果です。行き過ぎ量が減って、うまい具合に車線変更がされています。比較のため、アニメーション1の軌跡のグラフを同時に載せています。それでは、制御パラメータを変更したことによって、横風を受けたときの車体のずれを補正する制御に影響が出てこないのでしょうか?
アニメーション3は、そのシミュレーション結果です。強風を受けて、横ずれした車が元の位置に戻る時間が遅くなっています。しかし、横ずれの大きさがわずかなので、事実上問題があるとは思えません。これらのことから、前回、設定したPID制御パラメータの値は、Kp=10、KD=10、KI=0.5 とするのがよいと考えられます。このように、シミュレーションや試作機の実験結果を反映して制御パラメータの値を調整することを「チューニング」と呼びます。
前にも言ったけど、何も考えずに試作機作って、いきなりチューニングから始めても、似たような結果を得ることはできるで。特に、同じような機械を作る場合は、前の機械の制御パラメータと同じ値から始めれば、案外簡単にチューニングできるかもしれへん。だけど、それは「設計」ではあらへん。単なる「物マネ」や。物マネしてみたら偶然うまくいった、というだけや。OJTという名目で「物マネ設計」ばかりさせている会社を見かけるけど、若い技術者にそんなことばっかりやらせてる会社は、いい技術者が育たんな。
叔父さんが口癖のように言っている「根拠のある設計」をさせないと、若い人は伸びないということだね。うちの会社は大丈夫かな……? ところで、PIDパラメータを変えたら、車線変更制御では、なぜ行き過ぎ量が減少し、強風制御では、なぜ元に戻る時間が増えたのだろう?
ボード線図を描いてみれば分かるで。
草太は早速、2組のPID制御パラメータについて図17のボード線図を描いてみました。
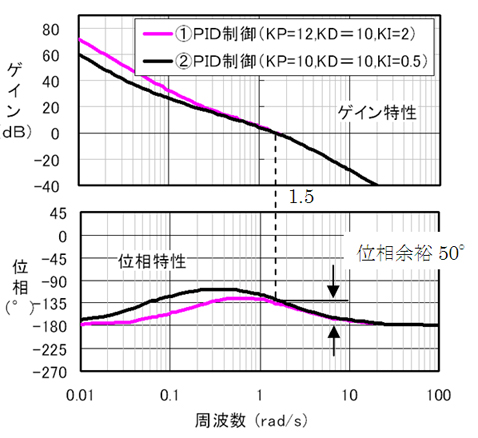 図17 2組のPID制御のボード線図
図17 2組のPID制御のボード線図そうか、低周波数のゲイン特性は(1)の方が(2)より高いけど、位相特性は(2)の方が(1)より位相に余裕があるんだ。だから、(1)は静特性の性能は(2)より優れているけど、動特性はほんのわずかだけど、発振ぎみになって(2)より劣っている。
そういうことや。「静特性を取るか、動特性を取るか。それが問題や!」っちゅうことや。
まるで、シェークスピアだね。
いよいよ次回は最終回です。今まで述べてきたことは線形制御です。しかし現実の世界は非線形です。線形制御がそののまま当てはまることはまずありません。多くの制御設計者は、非線形制御で苦労しています。
また、昔は、比例定数Kpや積分定数KIはオペアンプを使って実現していました。現在はコンピュータの時代です。ほとんどの制御がアナログ制御からデジタル制御に移り変わっています。
最終回は、非線形制御とデジタル制御について少しだけ触れて、この連載を閉めることにします。

Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 使用中に発火、サーキュレーター10万台をリコール
- 【レベル14】生成AIを味方に、3D CADを使いこなそう!
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 最大0.03mmの精度、黒色/光沢素材にも対応する4モード3Dスキャナー
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。