静特性を取るか、動特性を取るか。それが問題や:独学! 機械設計者のための自動制御入門(11)(2/4 ページ)

そうか。分かった。まずステアリングGstの制御特性について説明しようか。ステアリングの制御は、図4のように制御部からハンドルをθh度回せ、という指令を受けて、モータがハンドルを回し、さらにピニオン-ラック機構を介してタイヤの操舵角をθs回転させる、いうものや。
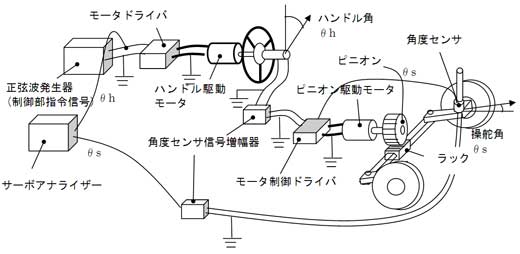 図4 ステアリングの周波数応答特性計測装置(再掲)
図4 ステアリングの周波数応答特性計測装置(再掲)
モータが2つもあるね。
本当は制御部から直接ピニオン駆動モータの制御ドライバに、制御したい操舵角信号を入れてもいいんやけど、ハンドルを回した方がいかにも車を制御しているなって感じがするやろ。そのためにわざわざ、モータでハンドルを回してるんや。だから、ハンドル駆動モータ系の伝達関数は1と考えていい。
無人でハンドルが回るといかにも自動運転らしく見えるからね。もっともらしい構造にしたかったんだね。操舵角θsをピニオン駆動モータの制御ドライバにフィードバックしているけど、それはなぜ?
ハンドル角θhに対応する角度だけタイヤの操舵角も回転させるためにフィードバック構成にしたんや。そうせんと、ハンドル角が0でないときは操舵角は増え続けるからな。
ステアリングのブロック線図をピニオン駆動モータ系を中心に書くと図5となります。ここでVはモータ端子間の電圧、Rはモータコイルの抵抗、Lはインダクタンス、iは電流、Ktはトルク定数、Keは逆起電力定数です。モータは電流値iに比例してトルクを発生します。
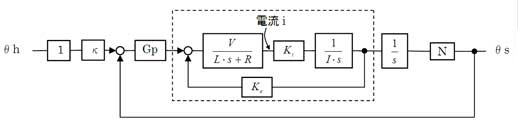 図5 ステアリング制御機構のブロック線図
図5 ステアリング制御機構のブロック線図
このあたりについては、市販のモータ制御の本に詳しく書いてあるね。
そうや。モータは回転すると発電機になるやろ。すると逆起電力が発生してモータに掛かる電圧が下がる。だから速く回れば回るほど、トルクが出にくくなる。Iはモータ軸から見たタイヤを含めた機構全ての等価慣性モーメント、Nはピニオン-ラックのギア比だ。Gpはピニオン駆動モータを制御するための伝達関数。そしてκは、タイヤ操舵角とハンドル角との比で、ハンドル角1度がタイヤ操舵角κ度に対応している。
普通はインダクタンスLの影響は小さく、それを無視することが多いので、ここでも0とします。そうすると、図5の点線内の伝達関数は、

となります。つまり、点線のブロックは一次遅れ要素となります。さらに、図5のブロック線図を1つにまとめると、ステアリングの伝達関数Gstは

となります。モータのトルク定数Ktは逆起電力定数Keと同じものですから、Ktが、慣性モーメントIと抵抗Rと比べて大きければ、対応する逆起電力定数Keも大きな値となります。ですから、Gpを単純な比例要素とすれば、ある周波数以下では(2)は一次遅れ要素に近似することができます。
あるいは、ピニオン駆動モータを制御するための伝達関数Gpを一次進み要素、
としても、Gstは一次遅れ要素とすることができます。従って、図5は、図6のように単純化して書くことができます。
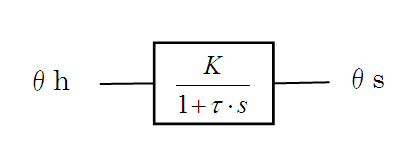 図6 単純化されたステアリングのブロック線図
図6 単純化されたステアリングのブロック線図つまり、ステアリングの伝達関数は、一次遅れで表現されるんだ。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 使用中に発火、サーキュレーター10万台をリコール
- 【レベル14】生成AIを味方に、3D CADを使いこなそう!
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 最大0.03mmの精度、黒色/光沢素材にも対応する4モード3Dスキャナー
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。