周波数応答:メカ設計用語辞典
メカ設計者のための用語辞典。今回は「周波数応答」について解説する。
周波数応答
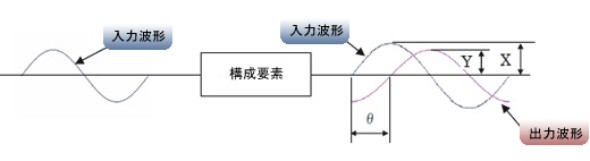
「周波数応答」は、制御機器や回路などに正弦波周波数の入力信号を与え、定常状態における正弦波の出力信号の波形の振幅や位相(時間の遅れ)などの時間的変化(応答)を示す。周波数特性ともいう。周波数応答はボード(ボーデ)線図を用いて表す。入出力信号の間の振幅比であるゲインと位相差を示す偏角で評価する。すなわち反応の遅れを定量的に評価することである。周波数応答は制御機器の動作が正常であるかの判断などに使う。
 周波数応答について
周波数応答について連載「独学! 機械設計者のための自動制御入門」の第2回では、猫の目の動きを使って周波数応答について解説している。
この動画は、猫が卓球をしている人のピンポン玉の動きを目で追っている様子である。ピンポン球がゆっくりと行き来しているときは、猫の目もピンポン球をぴったりと捉えているが、速くなるとだんだんと目が追い付かなくなっている。
動画の下に示しているボード線図は、猫を構成要素とし、ピンポン球の動きが入力、猫の目の動きが出力であるとする。ボード線図では出力振幅が縦軸、周波数の対数が横軸となる。入力が低周波の場合には猫の目の動きはピンポン球に確実に追い付いている。入力の周波数が高くなると出力振幅が小さくなり、出力の位相にも遅れが出るということになる。
CAEにおいて、周波数応答は振動解析に用いる。基本は電気信号の周波数応答と同じであり、周波数は振動数を指し、出力振幅は振動を受けて構造物が振れた幅(変位)になる。任意の周波数で加えられる正弦波の荷重(加振力、つまり振動で加わる力)が付加される場合の応答を見る。構造物の破損や騒音の原因となる共振の問題を解析する際などで用いられる。
関連記事
 設計者CAEとは何なのか
設計者CAEとは何なのか
機械メーカーで3次元CAD運用や公差設計/解析を推進する筆者から見た製造業やメカ設計の現場とは。今回は設計者CAEについて考える。 材力とFEMをシッカリ理解して、シッカリ解析!
材力とFEMをシッカリ理解して、シッカリ解析!
小難しい有限要素法を数式を使わずに解説する。まずは有限要素法の歴史を振り返り、解析の基本的な考え方を確認。 メッシュ生成時間の短縮と品質向上を両立、CFD用メッシュ生成ソフトの最新版
メッシュ生成時間の短縮と品質向上を両立、CFD用メッシュ生成ソフトの最新版
ヴァイナスは流体解析向けメッシュ生成ソフトウェア「Pointwise V18」の国内販売を開始。Pointwise 上級副社長のDr. Richard J. Matus氏が最新版の活用メリットについて紹介した。 ANSYSが掲げる8つのテクノロジー戦略と次世代モビリティ実現へのアプローチ
ANSYSが掲げる8つのテクノロジー戦略と次世代モビリティ実現へのアプローチ
年次イベント「ANSYS INNOVATION FORUM 2019」の基調講演では、ANSYS CTOのPrith Banerjee氏が登壇し、「Simulating the Future of Mobility(モビリティの未来をシミュレーション)」をテーマに講演を行った。 ダッソー、ビジネス課題の解決におけるシミュレーション技術の有効性を訴求
ダッソー、ビジネス課題の解決におけるシミュレーション技術の有効性を訴求
ダッソー・システムズは、同社のシミュレーションブランド「SIMULIA」に関する記者向けセミナーを開催。SIMULIAブランドの現状と役割、そして市場トレンドにおけるSIMULIAの活用ポイントについて説明した。 AIが設計し、人は妥当性を検証する――オムロンが見据える将来の開発現場
AIが設計し、人は妥当性を検証する――オムロンが見据える将来の開発現場
サイバネットシステムは、プライベートイベント「CAEユニバーシティ 特別公開フォーラム 2019 〜AI時代におけるCAEとの付き合い方〜」を開催。基調講演ではオムロン グローバルものづくり革新本部の岡田浩氏が「オムロンのCAE活用法と、AIと融合した今後のCAEについて」をテーマにCAEの未来像を語った。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。