光れ、LED!! それがマイクロマウスの第一歩:マイクロマウスで始める組み込み開発入門(3)(2/4 ページ)
ここまで、本当にお疲れさまでした。電子工作初心者のえみちゃんには、かなりハードルが高かったと思います。よく頑張りました!
組み立て作業は、はんだ付けに比べてカンタンですから、さくさくと進めましょう!(画像3)
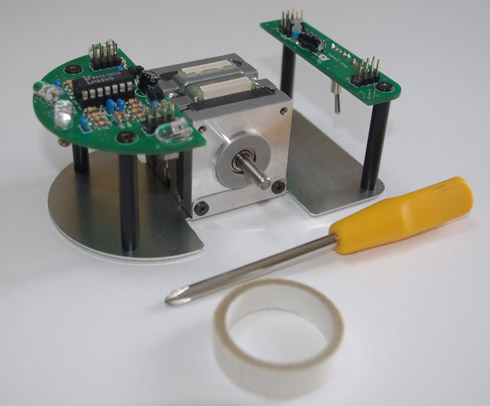
 画像3 はんだ付けした基板と本体部品
画像3 はんだ付けした基板と本体部品シャシーに4本の支柱をネジ止めし、センサー基板と電源基板を載せます。シャシーの真ん中には、ステッピングモータを配置します。このとき、コネクタの向きをそろえてモータ同士を両面テープで背中合わせに張り付けておきます(画像4)。
 画像4 プラスドライバー(NO.1)で組み立てる。左右のモータを両面テープで張るのを忘れずに!
画像4 プラスドライバー(NO.1)で組み立てる。左右のモータを両面テープで張るのを忘れずに!次に、モータの両端にホイールを取り付けます。その際、軸の先端とホイール穴の先端が一致するように調整し、六角レンチでイモネジを締めて固定します(画像5)。
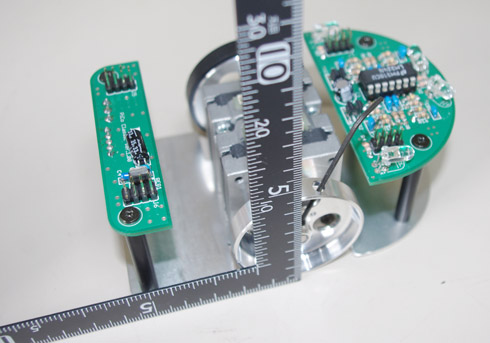 画像5 六角レンチ(1.5mm)を使って、ホイールを固定する。先端の位置をきっちりと合わせよう
画像5 六角レンチ(1.5mm)を使って、ホイールを固定する。先端の位置をきっちりと合わせようそして、モータとメイン基板をケーブルで接続します。ケーブルは前述のように左右があるので、取り違えないように注意しましょう。基板に黒ケーブルが2本並んで隣り合うように挿せば間違いありません(画像6)。
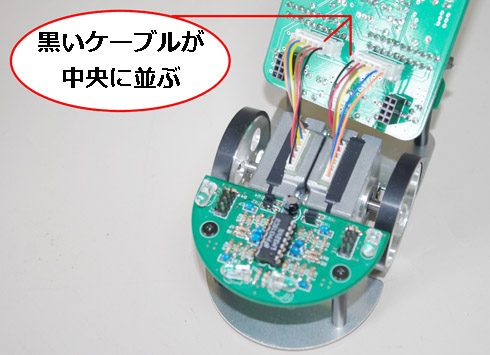 画像6 ケーブルで接続する。右モータにストレートケーブル、左モータがクロスケーブルになる。基板に黒・黒とケーブルが並べばOK
画像6 ケーブルで接続する。右モータにストレートケーブル、左モータがクロスケーブルになる。基板に黒・黒とケーブルが並べばOK次に、シャシーのネジがコースを擦らないようにするため、テフロンシートを張ります。テフロンシートは前方用(10×40mm)を1枚、後方用(10×15mm、30×30mm)を各1枚ずつ切り出します。30×30mmのテフロンシートは4隅を少し切り、角を取っておきます。前方用テフロンシートは真ん中で折り曲げ、シャシーを覆うように張り付けます。後部はテフロンシート小をシャシーの端に合わせて、縦方向に張ります。その上に、テフロンシート大を重ねます(画像7)。
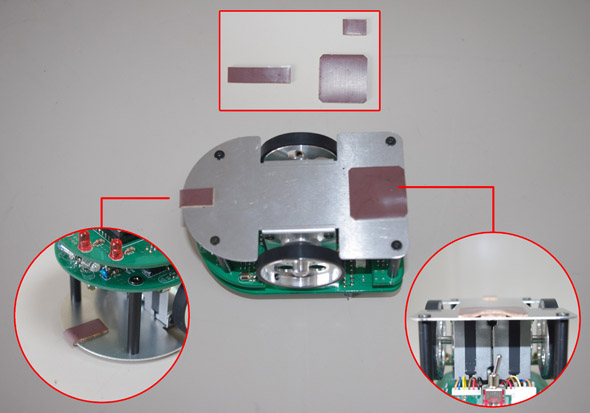 画像7 前方を包み込むのは、前進するときに迷路の段差に引っ掛からないようにするため。後方を2枚重ねにするのは、後重心だとセンサーが上向きになり壁を発見できなくなるためだ
画像7 前方を包み込むのは、前進するときに迷路の段差に引っ掛からないようにするため。後方を2枚重ねにするのは、後重心だとセンサーが上向きになり壁を発見できなくなるためだ最後にCPU基板をメイン基板の上に載せて完成です。このとき、挿入する方向に注意しましょう。CPU基板の電解コンデンサがモータドライバ側になります(画像8)。
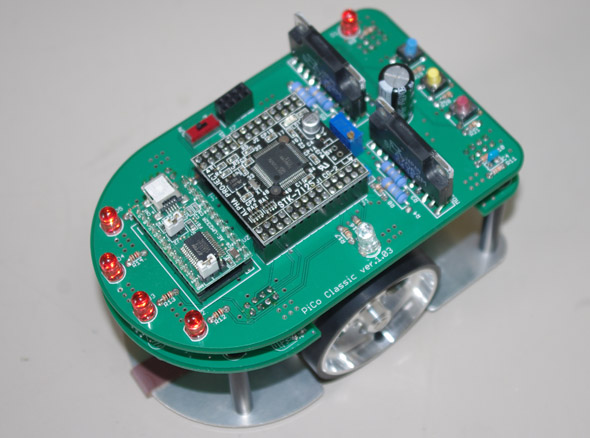 画像8 CPU基板を載せて完成! 基板の向きに要注意だ
画像8 CPU基板を載せて完成! 基板の向きに要注意だ開発環境のインストール

やったー! できたぁ〜!!

よく頑張ったね!

動くかなぁ〜。
よし、電源入れてみよっと! (パチッ!!)

……。え、えみちゃん?

あれぇ? 動かないですよセンパイ!! (ガーン)
え、えーとだね。
これはロボットだからプログラムがないと動かないんだよ。
わ、分かるよね?

あっ!
……。
……。
……て、てへぺロ〜(汗)。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- フィジカルAIに挑む日の丸連合、「Noetra」とは何か
- 周波数を使って熱電対センサーの測定値を安価な電線でより遠くまで伝送する
- 陸上自衛隊から四足歩行型警備ロボットシステムの導入検証業務を受託
- 数μmの傷を手で触って判別できる触覚増幅デバイス、デジタル化も視野に
- 日本の「完璧主義」から脱却し中国ヒューマノイドにどう立ち向かうか
- 新画素構造で20%以上高精細化した1/2型モバイル用CMOSイメージセンサー
- 1年でAfter AIの組織に生まれ変わったソラコム、「トークン資本」の安全な器へ
- 村田製作所が製品データ自動取得サービスの対象範囲を24倍に大幅拡大
- フィジカルAI搭載ロボットがモノポリーを実演、1台のPCにモーション制御も統合
- フィジカルAIに“二刀流”で対応するアドバンテック、日本に第3の製造拠点を構築
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。