「これなんじゃ?」「忍者!?」――Androidで制御する忍者ロボットとガチバトル:Google I/O 2012
アールティは開発者カンファレンス「Google I/O 2012」で、Androidで制御する等身大ロボットを用いた、人と対戦できる体験型ロボットゲーム「V-sido x RIC 忍者マスターシステム」を公開した。
サービスロボットの開発などを手掛けるアールティは、2012年6月27〜29日(米国時間)に米カリフォルニア州サンフランシスコのモスコーニセンターで開催される年次開発者会議「Google I/O 2012」に出展。
Android OS搭載タブレット型端末とAndroid Open Accessory Development Kit(以下、ADK)用ボードで制御する、等身大の人型ロボットを用いた実世界・体験型ゲーム「V-sido x RIC 忍者マスターシステム」を公開した。
 画像1 「RIC 忍者マスターロボット」。タブレット込みで全長120cm
画像1 「RIC 忍者マスターロボット」。タブレット込みで全長120cm同システムは、Android OS搭載スマートフォンやタブレット型端末が、ゲームのシステム運用機として、実世界にも展開できることを示すコンセプトモデル。同社の人型ロボット「RIC」の頭部にAndroid OS搭載タブレット型端末を組み込んだ「RIC 忍者マスターロボット」と実際に対戦することができる(画像1)。
「通常、対戦型格闘ゲームは画面の中だけで展開されるが、同システムにより、実世界に展開することができる。人間の対戦相手とリモートコントロールされた等身大の二足歩行人型ロボットによるインタラクティブなゲームは、世界で初めてとなる」(同社)。
頭部のAndroid OS搭載タブレット型端末に接続されたADK用ボード「RT-ADK mini」により、ロボットの物理的な接触をセンサーで検出する。ロボット本体は、画像センサー(「ASUS Xtion Pro LIVE」を利用)によりAttackプレーヤーの上半身をリアルタイムにモーションキャプチャーし、ゲームパッドにより歩行指令を取得。これら情報をリアルタイムに合成し、二足歩行ロボットを制御する。ゲームの開始/終了、ロボットへのパンチの当たり判定(物理的な相手へのヒット数、自分へのダメージ数)などの状態管理をAndroidタブレットに搭載したアプリケーションで実現している(図1)(図2)。
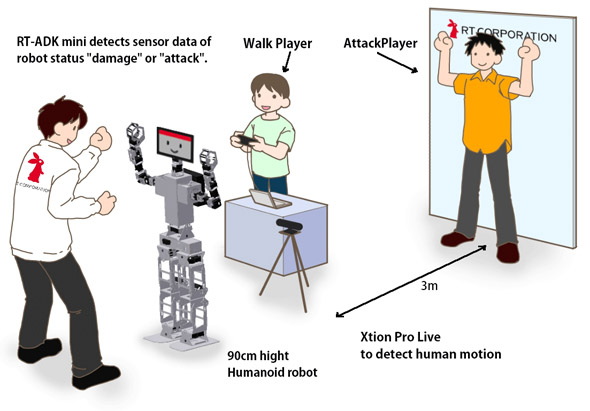 図1 「V-sido x RIC 忍者マスターシステム」の概要。Android OSを搭載するタブレット型端末と、同社が販売するADK用ボード「RT-ADK mini」、人型ロボット「RIC」により作り込まれている。“V-sido(ブシドー)”は人型ロボットの制御ソフトウェアの名称。“RIC(リック)”は同社が販売する人型ロボットの名称で、“Robot Inside Character”の略称。ADK用ボードは同社の「RT-ADK mini」が用いられている
図1 「V-sido x RIC 忍者マスターシステム」の概要。Android OSを搭載するタブレット型端末と、同社が販売するADK用ボード「RT-ADK mini」、人型ロボット「RIC」により作り込まれている。“V-sido(ブシドー)”は人型ロボットの制御ソフトウェアの名称。“RIC(リック)”は同社が販売する人型ロボットの名称で、“Robot Inside Character”の略称。ADK用ボードは同社の「RT-ADK mini」が用いられている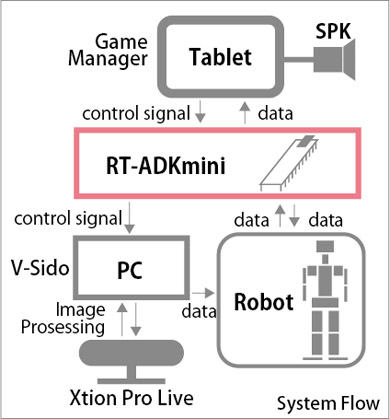 図2 「V-sido x RIC 忍者マスターシステム」のシステム構成
図2 「V-sido x RIC 忍者マスターシステム」のシステム構成「リアルタイムに画像処理しながらロボットの動作を生成し、バランスを崩さずに歩行しながら物理的に対戦相手と接触するゲームは、ロボット自身の制御もさることながら、相手との接触による物理的な反動を制御することも不可欠。今回のコンセプトモデルは、二足歩行ロボットでのロバストな動作を実現する上でも重要なチャレンジ」(同社)。

関連キーワード
ロボット開発 | ロボット | 組み込みAndroid開発 | Android | 忍者 | タブレットPC | 組み込み | Google I/O | コンセプトモデル | モーションキャプチャ | Android搭載PC | Androidタブレット | スマートフォン
関連記事
- >>「ロボット」特集
- >>「Android」コーナー
 組み込みでもAndroid解禁!? 模索から実用へ
組み込みでもAndroid解禁!? 模索から実用へ
組み込み業界でも存在感が増す「Android」。ET2010会場では、模索段階を脱却し、“実用”へ向けた本格的な取り組みを数多く見ることができた。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。