マジックハンドなど面白動作の多節リンクたち:メカメカリンクで設計しよう(11)(2/2 ページ)
【No.51】スコットラッセルの厳正直線運動
このリンク機構は、駆動ピンが水平移動すると、その直角方向に従動ピンを直線移動させ、従動ピンは厳密な直線を描きながら動作します。
 図7 スコットラッセルの厳正直線運動
図7 スコットラッセルの厳正直線運動【No.52】ブリカードの直線運動
複数のリンクを二等辺三角形になるようレイアウトした場合、駆動リンクを回転させると、従動ピンが、リンクを構成する二等辺三角形を、直角2等分する直線に沿って運動するものです。
 図8 ブリカードの直線運動
図8 ブリカードの直線運動【No.53】ケンプの直線運動
この機構では、3つのリンク固定端を結んだ同一直線上に従動ピンを配置しています。その線上で従動ピンが直線運動をします。
 図9 ケンプの直線運動
図9 ケンプの直線運動【No.54】スライダリンクの楕円コンパス
この機構では、駆動リンクの固定端と同一直線上に長穴を配置します。駆動リンクの回転によって、従動ピンが楕円の一部の軌跡を描きます。
 図10 スライダリンクの楕円コンパス
図10 スライダリンクの楕円コンパス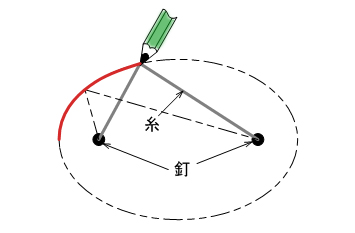
【No.55】テオ・ヤンセンのリンク機構
テオ・ヤンセン(Theo Jansen)氏は、オランダ出身の彫刻家であり、物理学者でもあります。彼の作品では、風力を利用したリンク機構による機械が有名です。以下は、テオ・ヤンセン氏の作品で使われたリンク機構です。複雑な機構なので、今回は解説を割愛します。
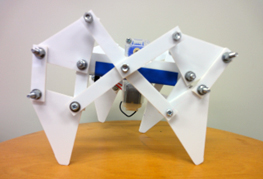
⇒番外編「のしのし歩く! テオ・ヤンセンのビースト機構」はこちら
まとめ
機械設計者であれば、設計の中で少なくとも簡単なリンク機構を考案しなければいけない場面に出くわすはずです。

リンク機構を考案する際の秘訣(ひけつ)は、“柔らか頭”と“軽いフットワーク”です。固定観念にとらわれないユニークなアイデアと、「発想の転換」をするための柔軟な思考力、そして「ダメだと思ったらサッサと違うアイデアに移行する」という臨機応変さが必要なのです。
本連載「メカメカリンクで設計しよう」を参考に、読者の皆さんのアイデアを盛り込み、オリジナリティーあふれる新たなリンク機構を考案していただきたいと思います。(完)


関連記事
 無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
今回は設計公式を基にリンクの動作を計算する方法と、FreeCADの編集機能を使った設計を紹介する。今回のテクニックを応用すれば干渉チェックも可能だ。Excel計算シート付き! 日産の可変圧縮比エンジン、マルチリンク機構で燃焼室の容積をシームレスに変更
日産の可変圧縮比エンジン、マルチリンク機構で燃焼室の容積をシームレスに変更
日産自動車のインフィニティブランドが「世界初」(同社)となる量産可能な可変圧縮比エンジンを開発したと発表。排気量2.0l(リットル)の4気筒ターボエンジン「VC-T」に、ピストン上死点(ピストンの上限)の位置をシームレスに変更できるメカニズムを組み込み、圧縮比を8〜14の間で変更できるとしている。 ミニチュア折りたたみイスを3Dプリンタで出力しよう
ミニチュア折りたたみイスを3Dプリンタで出力しよう
最終回は、ミニチュア折りたたみイスの3次元モデルの最終仕上げをした後、FabCafeへGo! 3Dプリンタで無事出力できるか? 記事中で、完成した3次元モデルのダウンロードもできる。 カマキリの捕獲動作を参考にした加工機が日本版イグ・ノーベル賞を受賞
カマキリの捕獲動作を参考にした加工機が日本版イグ・ノーベル賞を受賞
デジタルプロセスが製作する歯科医用CAD/CAMシステム加工機「WAXY」が、日本版イグ・ノーベル賞「Cosmopolitan Sophi-mor Nobel Prize 〜国際2匹目のどじょう賞〜」で、「歯科用CAD/CAM賞」を受賞した。 自動車のワイパーを上手に動かすリンク機構
自動車のワイパーを上手に動かすリンク機構
自動車のワイパーが互いに干渉せずに動作するにはどうしたらいい? 今回は、回転運動をするクランク機構の応用例を解説。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。