電車の屋根でもおなじみ! パンタグラフの動作:メカメカリンクで設計しよう(4)(2/2 ページ)
そこで、リンクの支点部にフリクション(摩擦力)を与えることにより、自由な位置で停止させる機構として使うことができます。また、ばねを仕掛けることにより、常に折りたたまれた状態になる、あるいは常に伸びきった状態になるように設計すれば、自由端である駆動ポイントに動作を与えても、除荷すると元に戻るような機構へ発展させることができます。
地面に固定し自立させて使う場合は、図4に示す多節リンクのパンタグラフ機構を使用します。送りねじを使ったパンタグラフは、自動車に車載されているジャッキで採用されている構造です。
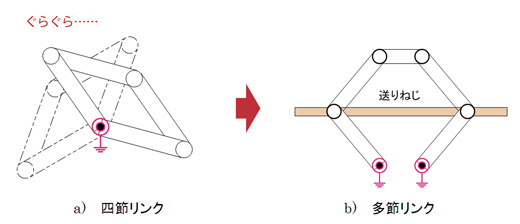 図4 パンタグラフ(2)
図4 パンタグラフ(2)
【No.14】ロバーバル機構(つりばかり)
四節リンクは、秤(びん:測り)として利用することもできます。一本棒のつりばかりでは、測定対象物の重量が同じでも、一本棒の回転支点から作用点までの距離が異なると、図5のように釣り合いは崩れてしまいます。
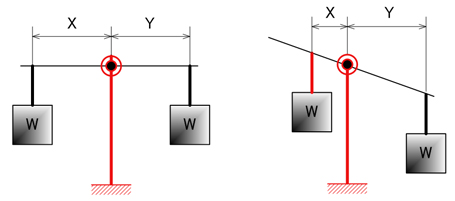 図5 一本棒の吊りばかり
図5 一本棒の吊りばかり物体を掛ける位置がX=Yの場合、左右の物体の重量が等しければ天びん棒は釣り合います。ところが、物体を掛ける位置がX<Yとなった場合、左右の物体の重量が等しくても、掛けた位置の距離が長い方へ傾きます。これは回転モーメントによって得られる回転力(トルク)の勝ち負けによるものです。
平行四辺形に配置したリンクは測定物の重さが等しければ、回転支点から左右異なった位置に物体を掛けても釣り合い、偏芯荷重の影響を打ち消し合うことができます。その機構を図6に示します。これは数学者のロバーバルが考案した機構で、はかりの原理として現在の電子天びんなどにも用いられています。
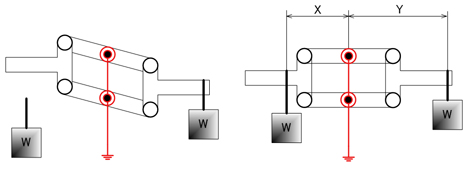 図6 ロバーバル機構(吊りばかり)
図6 ロバーバル機構(吊りばかり)【No.15】ロバーバル機構(上皿天びん)
No.14と同様に、一本棒の上皿天びんでは、測定対象物の重量が同じでも、一本棒の回転支点から作用点までの距離が異なると釣り合いは崩れます。物体を置く位置がX=Yの場合、左右の物体の重量が等しければ上皿は釣り合います。ところが、物体を置く位置がX<Yとなった場合、左右の物体の重量が等しくても置いた位置の距離が長い方へ傾きます(図7)。
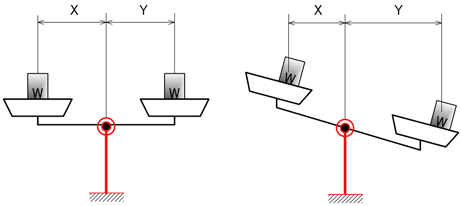 図7 一本棒の上皿天びん
図7 一本棒の上皿天びん平行四辺形に配置したリンクは測定物の重さが等しければ、回転支点から左右皿の上の異なった位置に物体を置いても釣り合い、偏芯荷重の影響を打ち消し合うことができます。その機構を図8に示します。
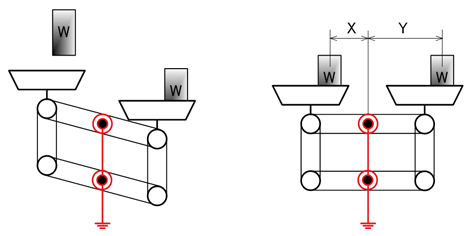 図8 ロバーバル機構(つりばかり)
図8 ロバーバル機構(つりばかり)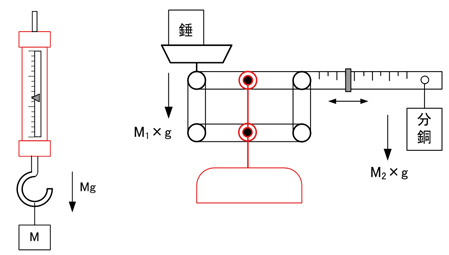
今回のまとめ
No.12の駆動リンクと従動リンクが等長で中間リンクを交差した場合、パッと見は対角線上で対称レイアウトであるため、等長の駆動リンクと従動リンクが同期して動くと思いがちですが、それぞれの回転角度に差が発生することが理解できたでしょうか。
日常生活の中でも比較的目にすることがあるパンタグラフでは、四節リンクではなく多節リンク構造のパンタグラフが多いことも分かりました。リンクを平行四辺形にレイアウトすることで、偏芯荷重の影響を打ち消し合うことができる秤として利用できることも知りましたね。
四節リンクを設計する場合、原理原則に従い構造を決めていかなければ、不具合が発生する可能性が大きくなります。不具合が発生しないか、仮設検証力を向上させてリンク設計に挑む姿勢が重要です。
次回は、四節リンクを使った航空機の車輪格納機構に特化して、動作特性や特徴を確認してみましょう。(次回に続く)

関連記事
 無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
無償3D CAD「FreeCAD」でリンク機構の設計に挑戦!
今回は設計公式を基にリンクの動作を計算する方法と、FreeCADの編集機能を使った設計を紹介する。今回のテクニックを応用すれば干渉チェックも可能だ。Excel計算シート付き! 日産の可変圧縮比エンジン、マルチリンク機構で燃焼室の容積をシームレスに変更
日産の可変圧縮比エンジン、マルチリンク機構で燃焼室の容積をシームレスに変更
日産自動車のインフィニティブランドが「世界初」(同社)となる量産可能な可変圧縮比エンジンを開発したと発表。排気量2.0l(リットル)の4気筒ターボエンジン「VC-T」に、ピストン上死点(ピストンの上限)の位置をシームレスに変更できるメカニズムを組み込み、圧縮比を8〜14の間で変更できるとしている。 ミニチュア折りたたみイスを3Dプリンタで出力しよう
ミニチュア折りたたみイスを3Dプリンタで出力しよう
最終回は、ミニチュア折りたたみイスの3次元モデルの最終仕上げをした後、FabCafeへGo! 3Dプリンタで無事出力できるか? 記事中で、完成した3次元モデルのダウンロードもできる。 カマキリの捕獲動作を参考にした加工機が日本版イグ・ノーベル賞を受賞
カマキリの捕獲動作を参考にした加工機が日本版イグ・ノーベル賞を受賞
デジタルプロセスが製作する歯科医用CAD/CAMシステム加工機「WAXY」が、日本版イグ・ノーベル賞「Cosmopolitan Sophi-mor Nobel Prize 〜国際2匹目のどじょう賞〜」で、「歯科用CAD/CAM賞」を受賞した。 自動車のワイパーを上手に動かすリンク機構
自動車のワイパーを上手に動かすリンク機構
自動車のワイパーが互いに干渉せずに動作するにはどうしたらいい? 今回は、回転運動をするクランク機構の応用例を解説。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。