刃物のような物体でもつかめる柔軟なロボットハンド開発:FAニュース
東北大学は、とがった物体や柔らかな物体、複雑な形状をした物体などをつかめるロボットハンドを開発した。従来品と比べて、つかめる対象物の範囲が飛躍的に拡大するため、災害復旧現場や工場での作業の効率化が期待できる。
» 2018年07月03日 07時00分 公開
[MONOist]
東北大学は2018年6月14日、とがった物体や柔らかな物体、複雑な形状をした物体などをつかめるロボットハンドを開発したと発表した。
従来の袋型ロボットハンドは、とがった対象物をつかむ際に破れてしまう点が課題だった。今回の研究では、これまでのゴム膜に替えて、袋表面の材料に伸縮性のある防刃生地を用いた。
その防刃生地を、先端が半球形状となる袋状にし、表面に滑り止め用のシリコンゴムを塗布して耐切創性に優れたロボットハンドを開発した。鋭くとがった物に接触したり、刃物で切りつけたりしても、袋とハンド本体を傷つけることなく作業できる。
開発したロボットハンドは、破損したバルブの開閉やガラスの破片、鉄筋が露出した鉄筋コンクリートなど、つかめる対象物の範囲が飛躍的に拡大するため、災害復旧現場や工場での作業の効率化が期待できる。
今後は、繰り返し使用を考慮して耐久性をさらに向上させるなど、同ロボットハンドの実用化を目指した研究を進め、3年以内に実際のがれきに近い環境下で実用性を確認する。さらに、廃品回収用の産業ロボットメーカーなどと協力して事業化を進める予定だ。
 ニッパーの刃部からの把持 出典:東北大学
ニッパーの刃部からの把持 出典:東北大学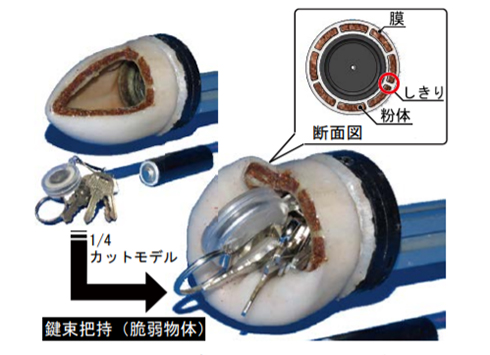 ロボットハンドの構造 出典:東北大学
ロボットハンドの構造 出典:東北大学
「FAニュース」バックナンバー
- AI活用の混載品パレットピッキングシステム構築、大成建設とファナック
- RS-422A、RS-485準拠のCOMポートを増設するシリアル通信モジュール
- 先端半導体用ゲート酸化膜の不純物が大幅減、効率的なOHラジカル生成技術確立
- 設備データと人の暑さストレスデータを一元管理、作業効率化と安全対策強化
- 3次元構造半導体の精密加工に対応、成膜装置と選択エッチング装置を発表
- 横河電機が最新版統合情報サーバを発売、マルチベンダー連携を強化
- 12インチウエハー形状に適合、圧力検査向け測定フィルム発売
- ニコンが解像度1.5μmのデジタル露光装置開発へ、生産性も30%以上向上
- パナソニックがドライバー実装機、7〜26インチの中型有機ELパネル向け
- フィーダーへのテープリール供給を自動化、FUJIが新ユニット開発
関連記事
 気持ち悪いけどすごい! “カメレオンの舌”でつかむロボットハンド
気持ち悪いけどすごい! “カメレオンの舌”でつかむロボットハンド
ドイツのFestoは、ハノーバーメッセ2015において「カメレオンの舌」をモチーフとしたロボットハンドを紹介した。形状の異なるものや柔らかいものを1つのハンドでつかめるのが特徴。 なんだコイツら、動くぞ! 生物型ロボット最前線
なんだコイツら、動くぞ! 生物型ロボット最前線
ハノーバーメッセ2015では工場の未来像の一端として、生物の動きを模した最先端ロボットの出展が数多く行われた。最先端ロボットの動向を取り上げる。 協働ロボット、ロボットシステムに残された課題と未来
協働ロボット、ロボットシステムに残された課題と未来
協働ロボットを現場で活用するのにどのような工夫が必要か――。ロボット技術の総合展示会「2017国際ロボット展」では、ロボットメーカーおよびユーザー企業によるパネルディスカッション「ロボットフォーラム2017」が実施され、協働ロボットの意義について語った。 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
Factory Automationの記事ランキング
- 三菱電機がホイストなど産業機器子会社の株式譲渡、社名も変更へ
- 人材育成から検査自動化、脱中国まで――DMG森精機欧州最大生産拠点の展望
- 三菱自がヒューマノイド参入 トヨタもAI学習強化、自動車メーカーの開発動向は
- DMG森精機が挑む工作機械のフィジカルAI、産総研と機械加工の基盤モデル構築促進
- ファナックとフィジカルAI、現場主義の開発思想
- 黄金期到来となるか―国家戦略のフードテック、日本の食産業の歴史的分岐点
- 人間の義手操作データでロボットの把持能力向上へ、ABBが米国企業と協業
- 製造業AI活用の鍵は「基盤整備」にあり、自律化工場に向けた4つのステップ
- ロボットの指へ直接組み込める超小型オールインワン型モーションモジュール
- RS-422A、RS-485準拠のCOMポートを増設するシリアル通信モジュール
Special SitePR
コーナーリンク

よく読まれている編集記者コラム



あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。