クルマの次は、ロボットシェアリング!? ――産総研、セグウェイを用いた実証試験を開始:ロボット技術
産業技術総合研究所(産総研)は、立ち乗り型モビリティロボットのシェアリングシステムを開発し、茨城県つくば市と共同でモビリティロボットによる移動支援サービスの実証試験を開始すると発表した。

産業技術総合研究所(以下、産総研)は2013年9月4日、立ち乗り型モビリティロボットのシェアリングシステムを開発し、茨城県つくば市と共同で、モビリティロボットによる移動支援サービスの実証試験を開始すると発表した。
実証試験の実施期間は2013年9月から2014年3月まで。4台のモビリティロボットを用い、産総研とつくば駅(つくばエクスプレス)近くの中央公園の2箇所に設置された充電ステーションの間、およそ3.8Kmの走行区間で行われる。実施期間中は、産総研 知能システム研究部門の常勤職員が実験に参加し、同システムを評価・検証する。
今回使用される立ち乗り型モビリティロボットのベースは「Segway(セグウェイ)」である。Segwayに「GPS」の他、走行中の前方画像を記録する「ドライブレコーダー」、予約時刻、位置・速度情報などを表示する「状態表示装置」などを取り付け、無線通信により管理サーバと常時情報のやりとりを行う。ちなみに、Segwayの連続走行距離は約25km(フル充電時)であるため、今回の運用に支障はないという。また、最高速度も「つくばモビリティロボット実験特区」の制限速度である10km/hに抑えられている。
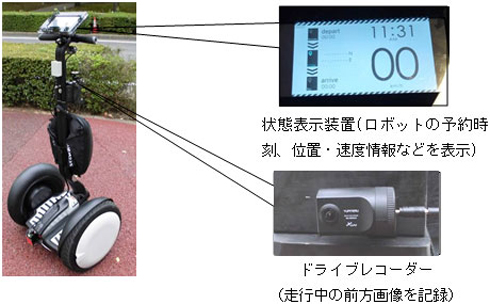 図1 状態表示装置などを搭載したモビリティロボット(Segway) (出典:産業技術総合研究所)
図1 状態表示装置などを搭載したモビリティロボット(Segway) (出典:産業技術総合研究所)管理サーバ上には、モビリティロボットの予約登録・確認を行う「予約システム」、運行状況(モビリティロボットの位置・速度情報)をリアルタイムに管理・把握できる「動態管理システム」が実装されている。また、充電ステーションとサーバ間では、モビリティロボットの保管情報や格納ボックスの扉のロック解除指示などのやりとりが行われる。
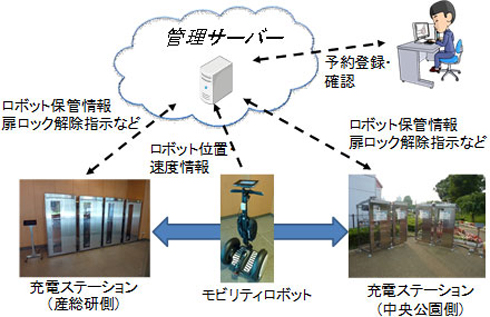 図2 「モビリティロボットシェアリングシステム」の全体構成図 (出典:産業技術総合研究所)
図2 「モビリティロボットシェアリングシステム」の全体構成図 (出典:産業技術総合研究所)利用の流れは次の通りだ。まず、利用者は、専用のWebサイト上でモビリティロボットの予約を行い、予約コードとQRコードを受け取る。このコードを出発地点となる充電ステーションに持参し、管理ポストで認証を行う。すると、モビリティロボットが格納されているボックスの扉のロックが解除され、そのまま搭乗することができる。モビリティロボットが、目的地であるもう一方の充電ステーションに近づくと、サーバ側から充電ステーション側へ格納ボックスのロック解除指示が送られる。到着したユーザーは、格納ボックスを開けてモビリティロボットを返却する。




産総研は、今回の取り組みを通じ、ビジネス用途でのシェアリング運用に関する各種データを取得・蓄積・解析し、運用システムの検証やモビリティロボットシェアリングの実用化に向けた可能性を検討。さらに、情報インフラを活用した移動支援サービスのモデルケースを提示することを目指す。将来的には、モビリティロボットの種類を増やす予定で、一般からの参加も検討しているという。
ロボット開発の最前線

関連記事
 トヨタ、立ち乗り型移動支援ロボット「Winglet」の公道実証実験を開始
トヨタ、立ち乗り型移動支援ロボット「Winglet」の公道実証実験を開始
茨城県つくば市とトヨタ自動車は、「つくばモビリティロボット実験特区」において、トヨタが開発を進めている立ち乗り型パーソナル移動支援ロボット「Winglet(ウィングレット)」による歩道での公道実証実験を開始すると発表した。公道でのWingletによる実証実験は今回が初となる。 予約して、後は乗るだけ――自律走行で送迎してくれる日立の移動支援ロボ「ROPITS」
予約して、後は乗るだけ――自律走行で送迎してくれる日立の移動支援ロボ「ROPITS」
日立製作所は、任意の地点まで自律的に搭乗者を迎えに行ったり、目的地まで連れて行ったりできる1人乗り用の移動支援ロボット「ROPITS」を開発した。 ASIMOの技術も生きる超小型パーソナルモビリティー「UNI-CUB」を発表、ホンダ
ASIMOの技術も生きる超小型パーソナルモビリティー「UNI-CUB」を発表、ホンダ
ホンダは、人間の歩行のように全方位への移動と両足の間に収まるコンパクトサイズを実現したパーソナルモビリティー「UNI-CUB」を発表。6月より日本科学未来館と共同実証実験を開始する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。