走れ、マイクロマウス!! 迷路攻略、完走する日を夢見て:マイクロマウスで始める組み込み開発入門(4)(4/4 ページ)
ステッピングモータを回すには、たくさんの電流が必要です。そこで、モータドライバでステッピングモータへ流す電流を調整しています。マニュアルに記載されているように、モータドライバにつながっている多回転半固定抵抗に掛かる電圧を約0.5Vにします。
作業しやすいように、メイン基板と電源基板をフレームから外します。モータケーブルも外してOKです。そして、バッテリーをつなぎ、スライドスイッチが[RUN]になっていることを確認して、電源をONにします。
テスターの黒色リード棒を、外側の6個穴の1つに当て、赤色リード棒を多回転半固定抵抗の真ん中のピンに当てると、多回転半固定抵抗の電圧が測れます(画像10)。
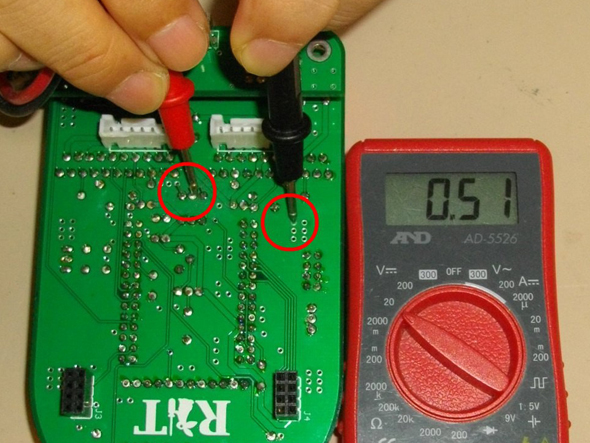 画像10 多回転半固定抵抗の真ん中のピンの電圧を測定し、0.5Vになるよう調整する
画像10 多回転半固定抵抗の真ん中のピンの電圧を測定し、0.5Vになるよう調整するボリュームを1回転すると電圧が約0.2V変化します。増減は、抵抗の取り付け方向によって変わるので、確認しながら作業しましょう。0.5Vに調整すれば、モータに700mAの電流が供給されます。
これでモータを回す準備ができました。Pi:Co Classicを元通りに組み立てて、サンプルプログラムの「Step6_run」をダウンロードし、実行します。
電源ONの状態で、黄色のボタンを押すたびに、Pi:Co Classicが1区画走ります(動画2)

動いたぁ〜!! あ〜よかった!

よし! これで、機体の準備はOKだよ。

センパ〜イ!
早く迷路を走らせましょうよぉ〜。

え? 何言っているの!! これから、プログラムを組むんだよ。
ようやく、その準備ができたところだじゃないか!

えぇっ!? まだ、迷路走らないんですか?

そりゃあ、もちろん、サンプルプログラムで走らせることはできるよ。
でも、それじゃあ、ボクたちのスキルアップにはならないよ!
……。
ボクは、構造化されたプログラムをイチから書きたいんだよ。
構造化にはメリットがあってだね〜。
……。
セ、センパイ! そのお話は、ぜひご飯を食べながら聞かせてください。

おぉ、いい心掛けだね。
じゃあ、お好み焼きでも食べに行こうか!

あ、…はい。
熱く語ってください(棒読み)。
Pi:Co Classicの動作確認を無事に終え、これでマイクロマウスが完成! と喜んだえみちゃんですが、実はこれからが本番です! 次回、北上くんが目指すマイクロマウスの構成が明らかになります。お楽しみに! (次回に続く)
コラム:迷路を自作しよう!
マイクロマウスを走らせるには、迷路が必要となります。公式の練習迷路を購入するのが一番ですが、個人で購入するには少々高価です。お財布と相談して、自作も検討しましょう。
本稿では、入手しやすく加工も容易な市販のパネル材「ハレパネ」(プラチナ萬年筆)で4×3区画迷路を作成しました。床には黒のカラーパネル(A1サイズ)を使用したので、塗装の手間も不要です。中央でカットし、裏からガムテープで止めておけば2つ折りにして保管でき、持ち運びも容易になります(画像11)。
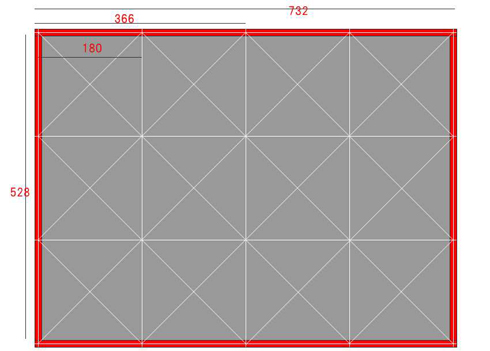 画像11 床の図面。A1サイズのカラーハレパネ(黒)を使用。中央でカットすると収納や運搬が容易になる
画像11 床の図面。A1サイズのカラーハレパネ(黒)を使用。中央でカットすると収納や運搬が容易になる壁はA2サイズから切り出しています。壁の厚さは12mmなので、5mm厚と7mm厚のパネルを張り合わせて対応します。壁の長さは180mmを基本として、168mmと192mmを切り出しておくと迷路パターンが増えます(画像12)。周囲の壁は、両面テープでしっかりと固定しましょう。中の壁は、小さくカットした両面テープで軽く止めます。
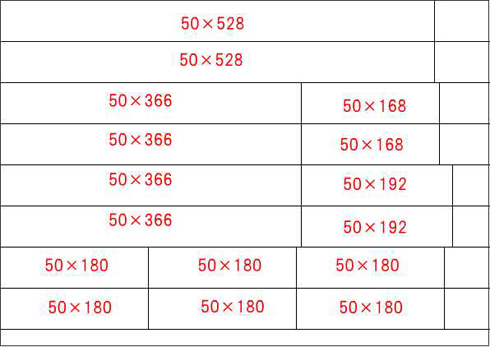 画像12 壁の図面。壁はA3サイズの5mmと7mmを使用した。1区画180mmを基準に、168mm、192mmを用意すると迷路パターンが作りやすくなる
画像12 壁の図面。壁はA3サイズの5mmと7mmを使用した。1区画180mmを基準に、168mm、192mmを用意すると迷路パターンが作りやすくなる床に描いたラインは、マウスを走行させる際に姿勢制御の状況を視覚的に確認するためのガイドです。
迷路の耐久性を重視するのであれば、板材で作るのがよいでしょう。ホームセンターで板材を購入すれば、有料でカットしてもらえるので作業がラクです。板材を使った迷路の作り方は、下記Webサイトが参考になります。
| 関連リンク: | |
|---|---|
| ⇒ | マイクロマウス工房(BasicMouse) |
| ⇒ | 関西マイクロマウス支部会(技術情報/迷路の準備保管) |
ロボット/ロボット開発 コーナー
 ,/mn/subtop/features/robot/
,/mn/subtop/features/robot/関連記事
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。