走れ、マイクロマウス!! 迷路攻略、完走する日を夢見て:マイクロマウスで始める組み込み開発入門(4)(1/4 ページ)
組み込み技術のスキルアップを目的に、小さくて賢いロボット「マイクロマウス」の製作に挑戦する北上くんとえみちゃん。前回、はんだ付けが完了した「Pi:Co Classic」を組み立てて、動作確認(LED点灯試験)を行った。今回は、センサーとモータの調整に取り組む!
前回のあらすじ
組み込み技術者に要求される要素が“ギュッ"と詰まった「マイクロマウス」。北上くんと新入社員のえみちゃんは、スキルアップを兼ねてマイクロマウスの開発を始めることにしました。前回は、はんだ付けと組み立てが完了した「Pi:Co Classic」の動作確認を行い、LEDの点滅(サンプルプログラムの動作)を無事確認できました(前回の記事へ)。


スイッチの動作確認
初めての電子工作にチャレンジし、サンプルプログラムによりLEDの点滅まで確認できた新入社員のえみちゃん。今日は、残りの機能をチェック。これで問題がなければ、いよいよマイクロマウスの走行に取り掛かれます!
おっと、えみちゃんが北上くんの家にやって来たようです。
――ピンポーン!(チャイムの音)

センパイ、こんにちはー。
いらっしゃい! 今日も元気だね!

はいっ!! だって、今日こそマイクロマウスが走るんでしょ!?
ワタシ、すっごく楽しみで〜。

なるほど。
じゃあ、早速、始めようか!
えみちゃんは、Pi:Co Classicが動き出すのを待ちきれない様子です。しかし、焦りは禁物。迷路を走らせるためには、それぞれの機能がきちんと意図した通りに動作するかどうかを、サンプルプログラムで確認する必要があります。
まずは、Pi:Co Classicの前方に並んでいる4個のモード表示用LEDとブザー、スイッチの動作を「サンプルプログラム4」でチェックします。
このLEDはモード選択状態を示したり、迷路走行中に壁の有無を示すなど、Pi:Co Classicの状態をユーザーに伝える役割を担います。ブザーも同様に、機体の状況を音で知らせます。
サンプルプログラムの実行方法は、前回と同様です。今回は、まず「Step4_Buzzer_do_le_mi」ディレクトリ以下にある「ClassicMouse.hws」をダブルクリックして、ルネサス エレクトロニクスの統合開発環境「HEW(High-performance Embedded Workshop)」を起動し、ビルドを実行します。
そして、Pi:Co ClassicをUSBケーブルでPCに接続し、スライドスイッチを[FW]にしてから、電源を入れます。
次に「フラッシュ開発ツールキット(FDT:Flash Development Toolkit)」を立ち上げ、「ClassicMouse.mot」を選択して[スタート]をクリックします。読み込みが終わったら、Pi:Co Classicの電源をOFFにし、スライドスイッチを[RUN]にしてから電源を再投入します。
右端のLEDが点灯していれば、まずはOKです。それでは、赤色・黄色・青色のボタンを押して、動作を確認してみましょう。
赤色のボタンを押すたびにブザーが鳴り、1〜15までの数値を4つのLEDで2進数表示します。黄色のボタンを押すとブザーだけが鳴り、青色のボタンを押すと2進数がデクリメントされます(動画1)。
3つのボタンで上記の確認ができたら、モード表示用LED、ブザー、スイッチの動作はOKです。
センサーの動作確認
やった〜。カンペキ!
これで、LED、ブザー、スイッチはOKっと。
次は、センサーの動作をチェックしようか!
はいっ!

センサーを調整するには、「ターミナルエミュレータ」が必要なんだ。
あと、肝心の「迷路」もね!(ジャジャーン!!)
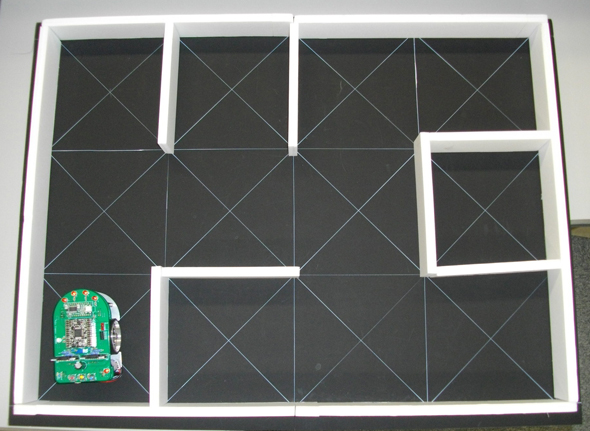 画像1 市販の張り付け可能なパネル材「ハレパネ」(プラチナ萬年筆)で自作した4×3区画の迷路。長辺中央で折りたためるので、収納や持ち運びにも便利
画像1 市販の張り付け可能なパネル材「ハレパネ」(プラチナ萬年筆)で自作した4×3区画の迷路。長辺中央で折りたためるので、収納や持ち運びにも便利うわぁ。これ、手作りですか!?
うん。「ハレパネ」でカンタンに作れるんだよ(記事末尾のコラムを参照)。
さぁ、センサーをチェックしよう!
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。