南極海で自律型海中ロボットによる無索での海氷下航行に成功:ロボット開発ニュース
東京大学生産技術研究所は、南極海のリュツォホルム湾とトッテン氷河沖において、AUVの「MONACA」による無索での海氷下航行に成功した。両海域で無索による往復航行を1回ずつ実施し、最大200mの往復航行に成功している。
東京大学生産技術研究所は2025年6月26日、南極海のリュツォホルム湾とトッテン氷河沖で、AUV(Autonomous Underwater Vehicle)「MONACA(モナカ)」のケーブル非接続(無索)での海氷下航行に成功したと発表した。両海域における無索運用は、世界初になるという。
 トッテン氷河沖で浮上した「MONACA」 出所:東京大学生産技術研究所
トッテン氷河沖で浮上した「MONACA」 出所:東京大学生産技術研究所MONACAは、海氷や棚氷の奥深くへ潜入し、氷の裏面の形状を高精度に計測する自律型海中ロボットだ。全長2.1m、空中重量235kgで、最大潜航深度は1500m、動作時間は8時間、氷の裏側へ最大10km潜入できる。マルチビームソーナーやDVL(ドップラー式対地速度計)、INS(慣性航法装置)を備えたセンサーユニット、音響測位装置、氷や母船に対する相対ナビゲーションアルゴリズムを搭載している。
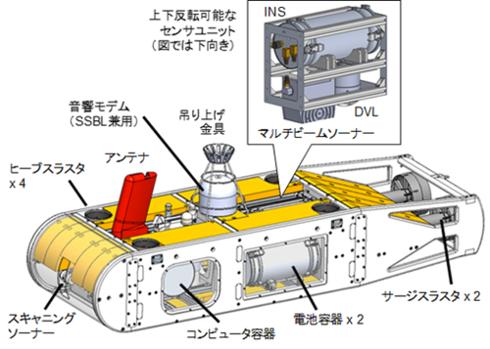 「MONACA」の機器配置 出所:東京大学生産技術研究所
「MONACA」の機器配置 出所:東京大学生産技術研究所研究グループは、2022年度の第64次南極地域観測で南極海でのAUV運用を実施したが、無索での運用はできず、母船周辺での運用にとどまったという。その結果を踏まえてMONACAの性能向上を図り、運用方法も再検討して2024年度の第66次南極地域観測を実施した。
第66次観測では、リュツォホルム湾において6日間で8回、合計約11kmの航行で映像や海流、水質などのデータを得た。トッテン氷河沖でも4日間で2回、合計約1.5kmの航行を実施した。両海域で無索による往復航行を1回ずつ実施しており、最大200mの航行に成功した。

海中では信頼性の高い無線通信手段がないため、予期しなかった事態が発生しても安全に戻れる自律航行アルゴリズムが必要となる。今回、無索運用に成功したことで、観測が困難な棚氷の裏側の探査が現実的な目標となってきた。
今後は、同実験で得られた各種センサーデータを基に自律航行アルゴリズムの性能向上を図り、より長距離の運用を目指す。氷床質量変化や海洋との相互作用の理解が深まることで、地球における南極の役割の解明や地球全体の環境変動予測の高精度化に貢献する。
関連記事
 次世代モビリティで海を変える──ASVやAUV、ROV活用の最前線
次世代モビリティで海を変える──ASVやAUV、ROV活用の最前線
国土交通省が『令和6年度「海の次世代モビリティ」の利活用に関する実証事業の成果報告会』を開催し、ASV、AUV、ROVといった海の次世代モビリティを活用した最先端の海洋技術の実証結果を紹介。今回の実証では、有害赤潮の早期発見、海洋インフラの点検、沿岸漁場の環境モニタリング、ドローンを活用したカモ食害対策などが実施された。 レアメタル資源探査システムにより水深1700mの磁気データ取得に成功
レアメタル資源探査システムにより水深1700mの磁気データ取得に成功
東京大学生産技術研究所とワールドスキャンプロジェクトは、海底に眠るレアメタル資源の探査システムを開発し、水深1700mでの磁気データ取得に成功した。 水中ドローンが空のドローンとは違う理由と目指す場所
水中ドローンが空のドローンとは違う理由と目指す場所
国土交通省主催による海域におけるドローンの利活用に関するセミナーが行われた。国交省が沿岸や離島地域の課題解決に向けて進めているAUVやROVを用いた実証実験の報告とともに、日本の沿岸や港湾で、いわゆる“海のドローン”を運用するための現時点での問題点やその解決に向けた取り組みを紹介した。 自律型海中ロボットが海氷下の全自動潜航と海氷裏面の全自動計測に成功
自律型海中ロボットが海氷下の全自動潜航と海氷裏面の全自動計測に成功
東京大学生産技術研究所は、海氷や棚氷の下で海氷裏面を全自動計測するAUV「MONACA」を開発した。北海道紋別港で海氷下を全自動潜航し、海氷裏面の形状データを取得した。2021年度以降の南極海への展開に備える。 海洋国家日本の最後のフロンティアは「水中」、LiDARや光無線技術で市場創出へ
海洋国家日本の最後のフロンティアは「水中」、LiDARや光無線技術で市場創出へ
ALANコンソーシアムが、水中で用いるLiDARや光無線通信、光無線給電などの技術開発や市場創出に向けた取り組みについて説明。2019〜2021年度の3年間をめどに、水中光無線技術の確立を目指す。 拡大期待の海洋IoT、機器開発を支える海洋計測技術の存在
拡大期待の海洋IoT、機器開発を支える海洋計測技術の存在
宇宙以上に未知の領域だとされる海の世界だが、ロボティクスやIoTなどの技術進歩により新たに海洋探査や測定などが盛り上がりを見せようとしている。しかし、こうした「海で使う機器」の開発には、特有のノウハウが必要になり、実際に試験を行うのも大きな負担になる。こうした「海で使う機器」の試験や、海洋計測機器の開発を行うのがOKIグループのOKIシーテックである。OKIシーテックの取り組みについて新たに代表取締役社長に就任した中井敏久氏に話を聞いた。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- イチから全部作ってみよう(34)マルチプログラミングとトランザクション
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- AIで脆弱性影響調査を自動化、管理工数を約70%削減
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。