非線形の場合も、難しいことをしなくて大丈夫!:独学! 機械設計者のための自動制御入門(12)(3/3 ページ)
むだ時間遅れとデジタル制御
遅れ要素がフィードバックシステムを不安定にさせるということは、これまでたびたび説明してきました。従って、遅れが内在している非線形要素は制御設計にとって好ましいものではありません。しかし、現実の世界では、出力が入力に比例する要素のみで構成されていても遅れの発生する場合があります。例えば、プロセス制御では、一定時間の間隔で温度や圧力などの状態を計測します。そして、この計測値を基に、バルブ開閉の制御量を決めます。この時間遅れを「むだ時間遅れ」と呼んでいます。
無駄時間Lの伝達関数は次式で表されます。
ですから、入出力の振幅比は1です。すなわち、
ゲインは、0(dB)
位相遅れは、arctan(Lω)
です。

むだ時間遅れは、プロセス制御特有のものでも何でもないで。昔のアナログ制御の時代はPIDコントローラーを電気回路で設計していた。だけど、いまはほとんどデジタル制御や。CPUとデジタル回路でPIDコントローラーを実現している。でも、デジタル制御だからこそむだ時間遅れが問題となることがあるんや。

どういうこと?
車の自動走行で言えば、車体の位置yをGPSで検知するとその値がCPUに読み込まれる。目標位置xとの偏差εをCPUが計算する。
まさしくコンピュータが得意な計算だね。
PID制御は、図10に示すように偏差εを比例(Proportional)、積分(Integral)、微分(Differential)したものの足し算だった。これらをCPUが演算し、ステアリングを駆動するモータドライバに出力する。つまり、CPUからD/Aコンバータを経て、モータドライバに電圧としてコマンドが行くんや。ただし、ドライバには常時コマンドが行っているわけではなく、サンプリングタイムと呼ばれる時間間隔ごとに命令が出される。
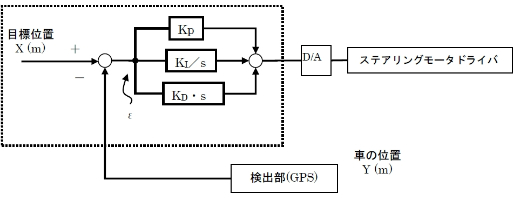 図10 自動運転制御コントローラーの構成
図10 自動運転制御コントローラーの構成その時間間隔分だけ、制御すべき情報が遅れるわけだね。
そうや。理想は、車体の位置yをGPSで検知したと同時に、制御すべき制御量、この場合はモータドライバの電圧を出力したいんや。アナログ制御ではそれができた。しかし、デジタル制御ではその制御量を決めるためには比例(Proportional)、積分(Integral)、微分(Differential)の計算をしなければならない。この計算結果はサンプリングタイム間隔で出力される。だから、その分遅れるわけだ。
なるほど。複雑な計算をさせればさせるほど、サンプリングタイムを長く取る必要があるから遅れが大きくなるわけだね。するとデジタル制御でのブロック線図は、本当は図11なんだね。
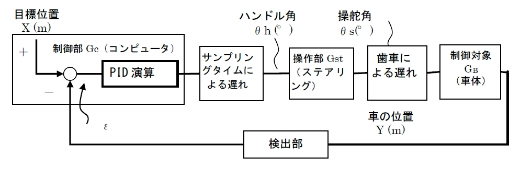 図11 自動運転制御ブロック線
図11 自動運転制御ブロック線ところで、具体的にCPUにPID制御計算をどうやってやらせるの? Pは比例といってるけど、要は掛け算のことだね。つまり、偏差εにある係数Kpを掛けるのはコンピュータが得意な計算だから分かる。偏差εをどうやって積分するの? CPUの中にオペアンプが内蔵されているってことはないよね?
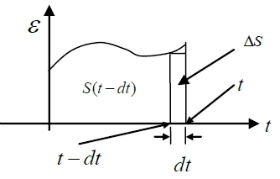 図12 積分
図12 積分なるほど、dt時間前の面積(積分値)から現在の面積(積分値)を予測するんだね。じゃあ、微分は?

これらにそれぞれの係数KI,KDを掛けて足せば、PID制御が完成する。これをブロック線図に描いたのが図10なんだね。
そういうこっちゃ。これでおじさんが草太に教えたかったことは全て教えた。後は草太が実践によって自分のスキルをアップさせるだけや。
銀二叔父さん、いままでありがとう。これからも頑張るよ!
技術者にとって必要なこと
現実の現象は複雑です。理論と呼ばれるものの多くは、それを簡単化して数式表現したものです。つまり、理論は絶対的に真というわけではなく、モデル化によって単純化したものが大部分です。すなわち多くが近似理論なのです。従って近似理論によって得られた解は実挙動を正確に再現したものではありません。しかし近似理論でも、上手に利用すれば、有益な知見を得ることができます。実際の挙動と、近似理論から得られた近似解とのすき間を埋めるのは、技術者としての知恵と経験なのです。
技術者にとって必要なのは、理論に関する知識とそれを操る能力、そして経験に裏打ちされた知恵です。その両方を兼ね備えた者こそ、実力のある技術者だと思います。

本連載が、これから自動制御を業務で実践しようと志しているエンジニアに、少しでも役に立つことができたならこれに勝る喜びはありません。読者の皆さん、長い間お付き合いくださり、どうもありがとうございました。
――海風の吹く、明石の自宅にて。銀二
ご愛読ありがとうございました!
今回で「独学! 機械設計者のための自動制御入門」を終わります。
最初は、自動制御理論を、なるべく数学を使わないようにと思いましたが、書き進めていくうちに、数式なしでは立ちいかなくなりました。しかし、よく見れば、どれも高校数学の域を超えていません。数学的な問題で本稿を読み進むことのできなかった人は、高校数学を復習した後、せひもう一度チャレンジしてみてください。
(終わり)
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 使用中に発火、サーキュレーター10万台をリコール
- 【レベル14】生成AIを味方に、3D CADを使いこなそう!
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 最大0.03mmの精度、黒色/光沢素材にも対応する4モード3Dスキャナー
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。