搬送物の協調搬送が可能に、移動ロボット同士の協調連携システムを開発:無人搬送車
東芝は、自律型移動ロボットの協調連携システムを開発した。上位の運行システムが異なるロボット同士であっても、直接通信で連携することで情報を共有し、スムーズに相互回避したり、1つの搬送物を協調搬送したりできる。
東芝は2021年9月17日、複数の自律型移動ロボットを直接通信で連携することで、迅速な相互回避や協調搬送ができる協調連携システムを開発したと発表した。
清掃や警備、搬送など用途が異なる移動ロボットは、運行システムが異なるケースが多い。そのため、位置や進行方向などの情報をロボット同士で共有できず、複数台が通路上で立ち往生するという状況が起こる。
同システムでは、運行システムを経由せずに移動ロボット同士が直接通信するプロトコルを定め、ロボット間の通信経路を切り替える無線LANマルチホップ方式を用いている。これにより、移動ロボット同士がリアルタイムで直接、情報を交換できる。

芝浦工業大学が深川江戸資料館で実施したロボット連携実験において、同システムを実証したところ、走行中のロボットがそれぞれの位置と進行方向の情報を共有することでスムーズにすれ違いができた。上位の運行システムが異なるロボット同士であっても相互回避可能だという。
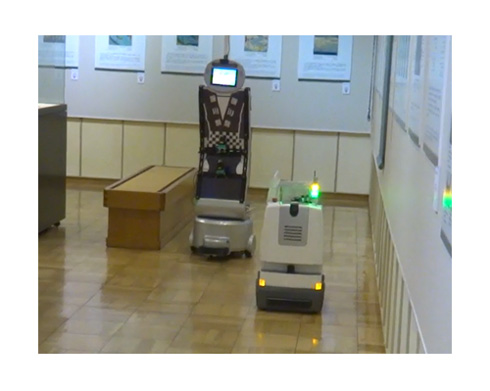 異種ロボットが連携し相互回避する様子 出所:東芝
異種ロボットが連携し相互回避する様子 出所:東芝連携実験では、複数台の同種の移動ロボットによる協調搬送も実証した。その結果、10ミリ秒以内という遅延の少ない、安定した直接通信によって、複数台の移動ロボットが1つの搬送物をタイミングを合わせて運搬できた。必要に応じてロボットを追加すれば、多様なサイズ、重量の搬送物に対応できる。
同社はこれまで、新エネルギー・産業技術総合開発機構とともに、共通の運行システムでメーカーや種類が異なる複数の移動ロボットを運用するインタフェースの仕様を策定し、サンプルソフトウェアを公開するなど、移動ロボットの仕様の標準化を図ってきた。今後も、ロボット革命・産業IoTイニシアティブ協議会の活動などを通じて、国際標準化も視野に入れて研究開発を進めていくとしている。
- ベッコフが日本向けドライブシステム、価格競争力と機能性を両立
- ドライ/ウェット対応自動光コネクター端面クリーナー、清掃回数最大6倍に
- 機械業界の他社けん制力ランキング2025発表
- 動的環境下でも安定検出するIO-Link対応ダイナミック傾斜センサー
- 最高速度1.5倍、定格推力9倍以上向上 リニアモーターテーブルの新製品
- 耐環境リモートI/Oに−25〜+75℃対応製品追加、デジタル入出力/シリアル
- 産業設備の無線通信を高速化、Wi-Fi6対応アクセスポイント専用機を発売
- 検査装置が「考える」時代へ オムロンがNVIDIAとの協業で広げるAI検査の新技術
- 自動化進展で保全業務の負荷高まるも人員未拡充、実態調査で判明
- AI活用の混載品パレットピッキングシステム構築、大成建設とファナック
関連記事
 “柔軟に変化する生産ライン”のカギであるAGV、その価値と課題
“柔軟に変化する生産ライン”のカギであるAGV、その価値と課題
成果が出ないスマートファクトリーの課題を掘り下げ、より多くの製造業が成果を得られるようにするために、考え方を整理し分かりやすく紹介する本連載。前回から製造現場でつまずくポイントとその対策についてお伝えしていますが、第9回では、マスカスタマイゼーション実現のカギとみられる無人搬送車(AGV、AMR)について取り上げます。 工場自動化のホワイトスペースを狙え、主戦場は「搬送」と「検査」か
工場自動化のホワイトスペースを狙え、主戦場は「搬送」と「検査」か
労働力不足が加速する中、人手がかかる作業を低減し省力化を目的とした「自動化」への関心が高まっている。製造現場では以前から「自動化」が進んでいるが、2019年は従来の空白地域の自動化が大きく加速する見込みだ。具体的には「搬送」と「検査」の自動化が広がる。 日立のAGV「Racrew」が躍進、サントリー最新工場の自動化も担う
日立のAGV「Racrew」が躍進、サントリー最新工場の自動化も担う
製造業や物流業を中心に需要が高まるAGV(無人搬送車)。日立はこのAGV市場で2014年から「Racrew」を展開。サントリーグループのサントリー<天然水のビール工場>京都とサントリー天然水 北アルプス信濃の森工場の2工場が、このRacrewを採用して自動化を推進している。 協働ロボットはコロナ禍の人作業を補う手段となり得るか
協働ロボットはコロナ禍の人作業を補う手段となり得るか
新型コロナウイルス感染症(COVID-19)による混乱は2021年も続きそうな兆しを見せている。製造現場でも人の密集や密閉空間による作業が制限される中、これらを回避するために人作業の一部を代替する用途で期待を集めているのが協働ロボットの活用だ。2021年はコロナ禍による働き方改革も含め、製造現場での協働ロボット活用がさらに加速する見込みだ。 協働ロボット普及のカギは「用途別パッケージ」、2020年は“第3の道”にも期待
協働ロボット普及のカギは「用途別パッケージ」、2020年は“第3の道”にも期待
人口減少が加速する中、製造現場でも人手不足が深刻化している。その中で期待を集めているのがロボットの活用だ。特に協働ロボットの普及により人と同一空間を活用し新たな用途開拓が進んでいる。2020年はこれらの技術進化による普及が本格的に進む一方で、「人」との親和性をさらに高めた“第3の道”の登場に期待が集まっている。 人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか
人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか
人手不足に苦しむ中で、工場でもあらためて自動化領域の拡大への挑戦が進んでいる。その中で導入が拡大しているのがロボットである。AIなどの先進技術と組み合わせ、ロボットを活用した“自律的な全自動化”への取り組みも進むが現実的には難易度が高く、“人とロボットの協調”をどう最適に実現するかへ主流はシフトする。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。