製造現場で働くロボット倍増へ、生産ラインの“穴”を埋める支援開始:産業用ロボット(4/4 ページ)
産業ロボットの「目」と「脳」の高度化と普及化開発
三次元メディアとSUWAオプトロニクスを助成先として研究開発が行われるのが「産業ロボットの『目』と『脳』の高度化と普及化開発」である。
製造現場のロボット活用として部品のピックアップなどは一般的だが、整列されていない部品のランダムピッキングの難易度は高い。ランダムピッキングでは3次元ビジョンセンサーが必要となるが、モノづくり現場では、工場ラインの安定稼働のニーズが強い一方で、粉塵(ふんじん)やオイルミストなどが発生する工場もあり、こういった工場では3次元センサーに高い防塵性が求められる。一方、光沢の強い金属部品の認識には、十分に強い光が必要ですが、発生する熱を抑える必要があり、防塵性との両立が困難だ※3)。
※3)関連記事:製造現場における画像処理【前編】
そこで、今回のプロジェクトでは、産業用ロボットに「目」と「脳」を持たせ、3次元センサーの防塵化と高輝度化を図り、粉塵の多い工場などにおいても光沢の強い金属部品の認識が可能となることで、ロボットの応用範囲を広げていくことを目指す。
具体的には、1200mmの視野に配置された対象物を計測するために十分な光量を出すことができ、かつ、発熱量を現行レベルから半減した高輝度密閉式のロボットビジョン専用プロジェクタを開発する。3次元計測の品質を高めることで、現在3次元計測できていない光沢の強い金属部品でも3次元計測できるシステム(移動撮影回数の半減)
を開発する。また、一番上にあるピッキング対象物に限定せず、認識された全ての対象物の中から最もピッキングしやすい部材を選択するシステムを開発する。
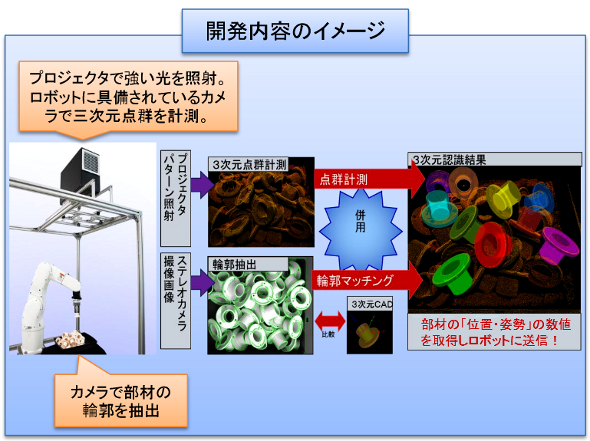 開発する3次元マシンビジョン技術のイメージ 出典:NEDO
開発する3次元マシンビジョン技術のイメージ 出典:NEDO低コストなバラ積み自動車部品組み付けシステムの開発
ヒロテック、シグマ、ダイキョーニシカワ、ワイテックの4社を助成対象とし、研究開発を進めるのが「低コストなバラ積み自動車部品組み付けシステムの開発」である。
画像処理技術の高度化により、乱雑に配置された部品(バラ積み部品)の位置や向きを特定して、ロボットハンドでつかむ「ランダムピッキング」の活用が広がりを見せつつある。自動車部品は、バラ積み状態で工場に入荷されるものが多く、一部工程が自動化された専用機にその部品をセットするため、バラ積み部品を整列・配置する作業を人手で行う状況がある。しかし、自動車部品には、光沢の違いなどにより認識結果をバラつかせる要因を含む。その結果、正確なランダムピッキングを実現するために、高価な画像処理装置を必要とし、中小企業におけるロボット導入のハードルを高くしている。
そこで、今回のプロジェクトでは、ひろしま産学共同研究拠点にて研究開発を実施。産総研でこれまでに開発されたランダムピッキング技術を核として、部品組み付け作業を自動化するため、導入コストを低く抑えた中小企業向けに適したビジョンシステムの開発を行う。
具体的には、安価なセンサーから得られた粗い精度のデータを用いて、数mm程度の精度で部品の位置姿勢を推定するためのアルゴリズムを開発する。低価格でも望む精度の認識を得られるようにする。また、数mm程度の精度で認識した作業対象部品を、ビジョンセンサーで再認識することで位置姿勢を算出し、安定して治具へ組み付けることができるロボットハンドを開発する。
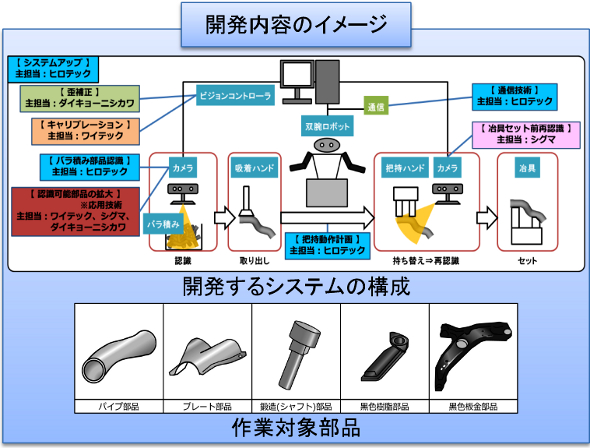 安価なバラ積みピッキングを実現するための開発ポイントと役割分担 出典:NEDO
安価なバラ積みピッキングを実現するための開発ポイントと役割分担 出典:NEDO関連記事
 「ロボット新戦略」が生産現場にもたらす革新とは?
「ロボット新戦略」が生産現場にもたらす革新とは?
日本再興戦略の一環として策定された「ロボット新戦略」は、2015年5月15日に新設される「ロボット革命イニシアティブ協議会」により、実現に向けた活動に入ることになる。本稿ではロボット新戦略が生産現場に何をもたらし、どういう方向性になるのかを解説する。 政府主導の“インダストリー4.0”対抗基盤「IoTによる製造ビジネス変革WG」が始動
政府主導の“インダストリー4.0”対抗基盤「IoTによる製造ビジネス変革WG」が始動
政府主導で2015年5月に始動した「ロボット革命イニシアティブ協議会」において、IoTによる製造業革新の動きについて、企業間連携や国家間連携の基盤となる「IoTによる製造ビジネス変革WG」が始動した。事実上、ドイツ政府が進める「インダストリー4.0」などに対する日本側の受け皿となる。 ロボットによる“殺人”は、工場の“自律化”に危機をもたらすか
ロボットによる“殺人”は、工場の“自律化”に危機をもたらすか
ドイツの自動車メーカー フォルクスワーゲンの工場で、産業用ロボットによる事故が発生した。インダストリー4.0などで、工場やロボットの自律化への動きが注目されているが、製造現場ではこの事故をどう受け止めるべきだろうか。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。- テーマサイト「産業用ロボット」
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。