製造現場で働くロボット倍増へ、生産ラインの“穴”を埋める支援開始:産業用ロボット(2/4 ページ)
モノづくりにおける6つのプロジェクト
双腕多能工ロボットSIマザーシステム開発と実用展開
カワダロボティクスを助成先として研究開発を進めるのが「双腕多能工ロボットSIマザーシステム開発と実用展開」である。
中堅・中小企業に向けてロボットを導入するためには、多くのプロセスや作業を行える「多能工ロボット」が必要となる。しかし、このロボットそのものの開発に加えてロボット導入を実現するためのシステムインテグレーターなども不足している現状がある。
そこで今回のプロジェクトでは、システムインテグレーターが簡単にロボット導入システムを構築できるように、ロボットの動作を設定する作業を容易にする「SIマザーシステム」と、これらのシステムを専門知識のない工場作業者でも簡単に設置・調整できるようにする「eaSI(イージー)タスクシステム」の開発を行う。同プロジェクトにより、多品種少量プロセスにおけるロボット自動化工程の普及を進めるとしている。
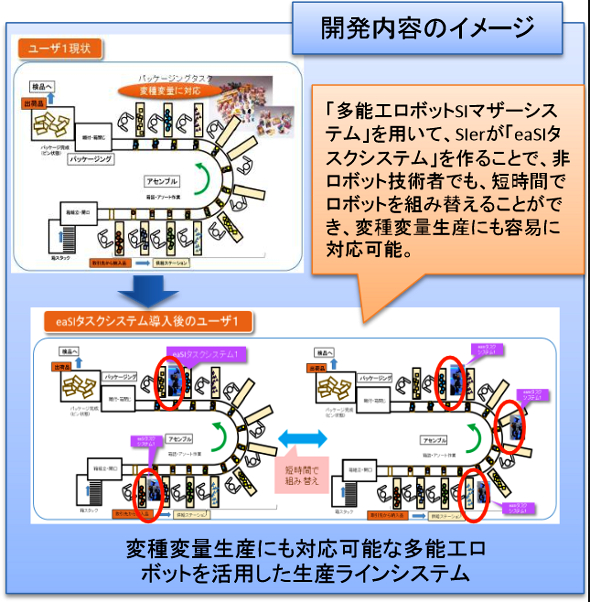 双腕多能工ロボットSIマザーシステム開発による活用イメージ 出典:NEDO
双腕多能工ロボットSIマザーシステム開発による活用イメージ 出典:NEDO柔軟物組み立て工程のロボット作業計画自動生成技術開発
富士通を助成先として研究開発を進めるのが「柔軟物組み立て工程のロボット作業計画自動生成技術開発」である。
電気配線(ケーブル)など、柔軟物を含む組み立て作業はロボットにとっては難易度が高い作業となる。また、ロボットの作業手順や動作タイミングの計画(作業計画)、動作のさせ方(動作計画)、制御プログラミングの作成(プログラミング)の一連の生産準備工程には、専門技術者による長時間の試行が必要で、ロボットの製造現場導入が進まない原因の1つになっていた。
そこで、今回のプロジェクトでは「ロボットによる工程/作業/動作計画を最適化する技術」と「ケーブルの特性を加味した動作プログラムの生成技術」の2つの開発を行う。具体的には、作業の工程計画に必要な時間を3分の1以下にする。またケーブルの組み立てプログラミングについては、ロボットの動作とケーブルが変形する挙動を一体的に解析する挙動シミュレーション技術の開発と、ケーブル組み付け作業の自動生成技術の開発を行い、ケーブル組み付けの動作計画の作成に要する時間を5分の1以下に短縮する。これらにより、これまで適用が困難とされていた柔軟物を含む組み立て工程のロボット化を目指す。
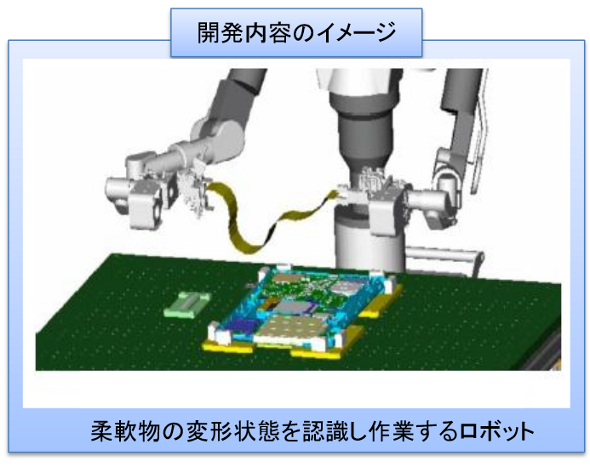 柔軟物の変形状態を認識し作業するロボットのイメージ 出典:NEDO
柔軟物の変形状態を認識し作業するロボットのイメージ 出典:NEDOCopyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。