製造現場で働くロボット倍増へ、生産ラインの“穴”を埋める支援開始:産業用ロボット(3/4 ページ)
ワイヤハーネス製造自動化の実用化技術開発
オートネットワーク技術研究所、住友電装を助成先として研究開発を進めるのが「ワイヤハーネス製造自動化の実用化技術開発」である。
自動車の車内配線など、多くの電気配線で構成される「ワイヤーハーネス」の製造は、柔軟物(ケーブル)の複雑かつ多様な作業が求められ、しかも、ケーブルの形状がその作業過程の中で変化してしまうことから、多数の技術課題が存在し、ロボットの導入が難しい状況となっている。これらの作業工程は労働集約的であることから、ワイヤーハーネスの国内需要の大半も、製造を海外に依存しており、信頼性向上
やリードタイム短縮の観点から、ワイヤーハーネス製造自動化による国内回帰が望まれている。
そこで、今回のプロジェクトでは、ケーブルの分岐作業、クランプ(結束バンドなどでケーブルを束ねる車両への固定部品)取り付け、外装品取り付けなど人手による作業工程をロボット化することのみならず、ロボット化を前提としたワイヤーハーネス製造の新工法を新たに開発し、ワイヤーハーネス製造の合理化を目指すものだ。
具体的には、「ロボットの強みを生かすワイヤーハーネス製造の新工法」と「クランプ・外装部品取り付けとロボット導入支援技術」の2つの開発を進める。ワイヤーハーネス製造の新工法では、多本数のケーブルを整列させ、ビジョンシステムと複数のロボットハンドなどを活用して分岐・結束させるロボットシステムを開発する。ロボット導入支援技術については、分岐・結束したケーブルに、クランプや外装部品を取り付けるロボットシステムを開発し、人手で行っている作業を自動化することを目指す。
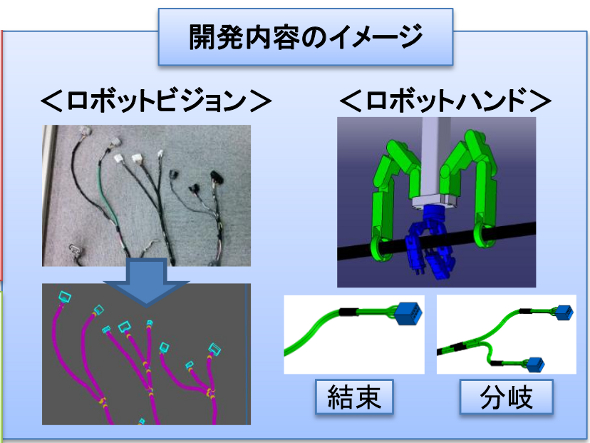 ロボットビジョンやロボットハンドを活用するワイヤーハーネス新工法開発のイメージ 出典:NEDO
ロボットビジョンやロボットハンドを活用するワイヤーハーネス新工法開発のイメージ 出典:NEDOダイレクトティーチング機能を搭載した多能工ロボット開発
スキューズを助成先として研究開発を進めるのが「ダイレクトティーチング機能を搭載した多能工ロボット開発」である。
自動車製造現場では溶接や塗装といった分野でのロボット化が進んでいるものの、組み立てや組み付け工程では、多くの人手による作業が存在する。また、食品製造業における盛り付けや仕分け工程、農業における収穫や選果作業も、基本的には人手に頼るものが多い。
これらの領域でロボットが活用されない理由として、さまざまな材質の不定形物や柔軟物の認識と把持が困難であることや、ロボットを動作させるためのプログラミングが煩雑であるため長時間を要し、ロボット導入のネックとなっていることなどがある。
そこで、今回のプロジェクトでは、「不定形物や柔軟物の認識技術・把持技術の開発」と、「ダイレクトティーチ機能(ロボットアームを作業者が直接手で持って動かして、大まかな位置決めを行う)を有するロボットアーム開発」の2つのポイントで研究開発を進める。これらを通じて、人手作業を代替・支援するための多能工ロボットの普及につないでいく。
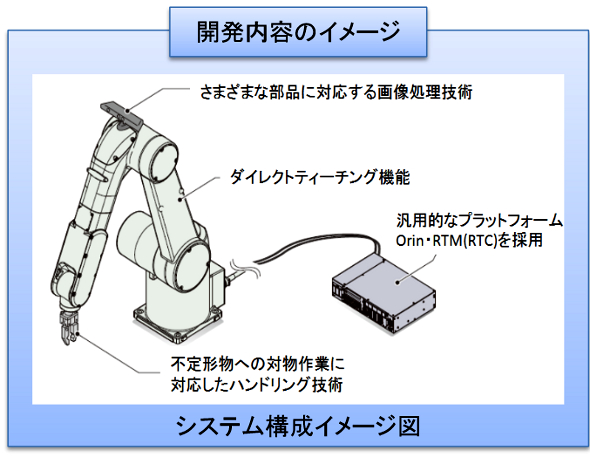 「ダイレクトティーチング機能を搭載した多能工ロボット開発」における具体的な開発のポイント 出典:NEDO
「ダイレクトティーチング機能を搭載した多能工ロボット開発」における具体的な開発のポイント 出典:NEDOCopyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。