オールジャパンで挑む災害対策ロボット開発、実用化への道は?:あれから2年(2/3 ページ)
通信技術(日立製作所)
Quinceが福島第一に投入された際、課題の1つとして挙げられていたのが、遠隔操作に用いる通信方式をどうするかということ。ぶ厚いコンクリート壁で囲まれた原子炉建屋内では、無線の電波が非常に届きにくい。そのため、Quinceでは有線を採用したが、帰還途中にケーブルが断線し、ロボットを失うという事故も引き起こした。
今回、日立製作所が開発したのは、こういった環境でも無線通信を使えるようにするための「通信システム」だ。原子炉建屋内に無線LANのアクセスポイント(AP)を多数配置することで、広い範囲を無線でカバーする。AP間はケーブルで接続され、通信と電力を供給する。同社は、別プロジェクトでAPを運搬できるロボットも開発しており、設置や配線などの作業も人手に頼らず無人で行えるという。

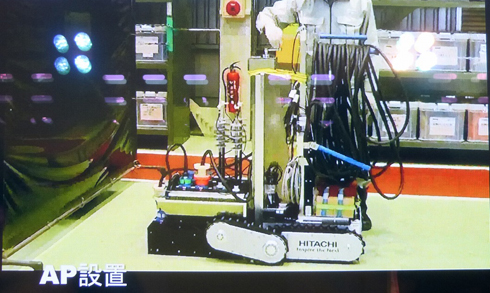 今回、展示はなかったが、無線LANのアクセスポイントの設置もロボットで行える。運搬の他、コネクタの挿入や電源ボタンの操作も行えるとか
今回、展示はなかったが、無線LANのアクセスポイントの設置もロボットで行える。運搬の他、コネクタの挿入や電源ボタンの操作も行えるとか無線通信には、5.2GHz帯のIEEE802.11aと、4.9GHz帯のIEEE802.11jを採用。2系統による冗長性を確保し、一方で問題が起きても、もう片方でバックアップできるようにした。仮に、AP間のケーブルが断線した場合でも、各APはバッテリーで8時間運用できる他、AP間の通信も有線LANから無線LANに切り替えられるようになっており、通信環境を維持できるよう工夫されている。
遠隔操作ヒューマンインタフェース(東芝)
ロボットの基本的な操作方法やコンソール画面のUIなどを統一することで、操縦者の混乱防止や操作訓練の期間短縮に役立てる「遠隔操作ヒューマンインタフェース」を東芝が開発した。ロボットの操縦には、ゲーム用のコントローラを使用。異なるロボットでも同様の操作で前進・後退や旋回などが行えるという。

狭隘部遠隔重量物荷揚/作業台車の開発(三菱重工業)
三菱重工業が開発したのは、8mまでの高所で作業できる「MHI-Super Giraffe(MARS-C)」(関連記事6)。全長2.35m、重さ4tという大型の作業ロボットで、はしご車のように伸縮する機構を上部に搭載する。先端の工具モジュールを交換することで、バルブの開閉、漏えいの検出、配管の切断など、さまざまな作業に幅広く対応できる。


走行機能を持つ台車部には、リチウムイオンバッテリーを搭載しており、連続5時間の長時間稼働が可能。5段伸縮式のはしごの先端には、7自由度のロボットアームが取り付けられており、人間の腕のように汎用的に利用できる。
先端工具だけでなく、台車部やはしご部もモジュール設計になっており、例えばクローラ方式の台車やパンタグラフ方式の荷揚げ部など、さまざまな組み合わせで利用することが可能だ。同社はインタフェース周りの技術情報を外部に公開し、他社によるモジュール開発も積極的に促進していく方針を掲げる。
重量物ハンドリング遠隔操作荷揚台車(東芝)
また東芝は、最大4tの重量物を30mの高さまで持ち上げることができる「重量物ハンドリング遠隔操作荷揚台車(スーパーリフタ)」も開発している。三菱重工業の高所作業ロボットのような階段を走行できない大型ロボットを上層階へ送り込むことができる。
このロボットには走行能力もあり、現場への移動から設置・荷揚げまで、全ての作業を遠隔で操作できる。残念ながら開発が間に合わず、成果報告会で実機を見ることはできなかったのだが、CGでその仕組みが紹介された。
ガンマカメラ(日立製作所)
原子炉建屋内に直接人間が立ち入り、活動するには、除染や遮蔽などにより、放射線量を下げる必要がある。そのためには、ホットスポット(局所的に放射線量が高い場所)の特定が欠かせない。
日立製作所が開発したのは、高線量下でも使えるようにしたガンマカメラだ。福島第一のような高線量下では、全方向から強い放射線を浴びることになるので、センサーの視野方向だけを除いてカメラ全体を鉛で遮蔽しないと、正しく計測できない。重量が増えるという課題があり、プロジェクト当初は「200kgくらいになりそう」という話もあったようだが、同社はこれを80kg程度にまで抑え、Tsubakiに搭載できるようにした。

このガンマカメラは、300mSv/hという高線量下でも使用可能。レーザーセンサーで対象物との距離も計測しており、距離による減衰を補正したデータを取得できる。計測した放射線の分布情報は、光学カメラの映像に重ね合わせて表示することが可能で、汚染状況が確認しやすい。

Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。