
有限要素法入門 〜連立方程式の解法、変位の計算〜:CAEを正しく使い疲労強度計算と有機的につなげる(3)(1/7 ページ)
金属疲労を起こした際にかかる対策コストは膨大なものになる。連載「CAEを正しく使い疲労強度計算と有機的につなげる」では、CAEを正しく使いこなし、その解析結果から疲労破壊の有無を予測するアプローチを解説する。連載第3回では、前回作成した全体剛性マトリクスから弾性変形後の変位を求める。そして、変位−ひずみマトリクス[B]を導出する。
前回は、今さら誰もやらないであろう「有限要素法」の解説を始めてしまい、全体剛性マトリクスを作りました。これから弾性変形後の変位を求めましょう。そして、変位−ひずみマトリクス[B]を導出します。この辺りが1次要素と2次要素での解析精度の違いが出てくるポイントになります。
連立方程式の解法、変位の計算
以下、連載第2回の図4を再掲し、図1とします。連載第2回の式28を再掲し、式1とします。


節点3に注目します。節点3には要素①の荷重、要素②の荷重、要素③の荷重が作用しています。式1の荷重ベクトルの上から5行目です。これらはつり合い状態にあるので荷重の和はゼロになります。次式となります。
節点1のx方向変位は拘束されているので、外界の拘束点から反力を受けています。これがf①1です。反力は未知数なので、f①1をf1と表記しましょう。節点5には−Y方向にWの外力が作用しています。次式のように表記しましょう。
f1とWを図1に記入しました。節点1のx方向変位、節点2のx方向変位、節点2のy方向変位は拘束されているので次式が成立します。
前述した関係を式1に代入しましょう。次式となります。変位が拘束されている行に色を付けておきました。

変位が拘束されている行を全て下に移動させましょう。最初に1行目と10行目を入れ替えます。次式となります。このとき、1列目と10列目を入れ替えるのを忘れないでください。

同様に3行目と9行目、4行目と8行目を入れ替えます。次式となります。

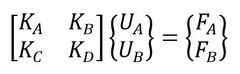
全体剛性マトリクスを4つに分解して名前を付けます。変位ベクトルと荷重ベクトルも2つに分解して名前を付けます。次式です。

名前を付けた行列とベクトルを記号で書くと次式となりますね。
 式9
式9上式の1行目と2行目を別々に書きましょう。
式10の行列[KA]の逆行列を求めて[KA]-1と書きます。逆行列の求め方はいろいろあるので読者の皆さんが習った方法で行ってください。式10の左辺第2項を右辺に移して、両辺に左側から[KA]-1を掛けます。次式です。
[KA]-1[KA]は単位行列になるので上式は以下となって、各節点の変位が求まりました。
上式の{UA}を式11に代入すると{FB}、つまり拘束点の反力が求まります。次式です。
ここでの説明は{UB}の各行はゼロだったのですが、拘束点ではなく強制変位を掛けたいときはその数値が{UB}となります。
以上の操作で各節点の変位が求まりました。このように節点変位を先に求める方法を「変位法」と呼びます。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。