三菱重工業の遠隔作業ロボ「MHI−MEISTeR」が福島第一原発へ:災害対応ロボット
三菱重工業は、同社の遠隔作業ロボット「MHI−MEISTeR(マイスター)」が、2014年1月より、東京電力・福島第一原子力発電所に投入され、除染作業の実証試験とコンクリートコアサンプリング作業を実施したことを発表した。

三菱重工業は2014年2月20日、同社の遠隔作業ロボット「MHI−MEISTeR(マイスター)」が、同年1月より、東京電力・福島第一原子力発電所(以下、福島第一原発)に投入され、除染作業の実証試験とコンクリートコアサンプリング作業を実施したことを発表した。
MHI−MEISTeRの開発発表(関連記事:2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」)が2012年12月のことだったので、現場投入まで1年以上が経過したことになる。
 福島第一原子力発電所1号機での吸引除染作業中の様子
福島第一原子力発電所1号機での吸引除染作業中の様子MHI−MEISTeRは、作業実証のため2014年1月に福島第一原発1号機に投入され、プラント内の放射能汚染物質を専用ノズルで吸引する吸引除染や、研削材を噴射して汚染表面を薄く削り取るブラスト除染といった作業を行った。さらに、狭い通路での走行確認や、建屋内の汚染程度を調査することを目的としたコンクリートコアサンプリングなども実施。壁や床から70mm程度の深さのコンクリートサンプルを採取するコンクリートコアサンプリングでは、専用のドリルやハンド(挟み爪)をロボットアームに装着し、遠隔操作でサンプリングを行うことに成功した。
MHI−MEISTeRはどんなロボット?
MHI−MEISTeRは、人が近づけないような災害・事故現場などで、点検/保守や補修作業を行うことができる高機能ロボットである。7つの関節(7自由度)を有する2本のロボットアームで、さまざまな作業をこなすことが可能。ロボットアームの先端には、専用の作業ツールを取り付けることができ、片方のロボットアームでモノをつかみ、もう一方でそれを切断するといった2つの作業を1台で行える。ちなみに、MEISTeRは“Maintenance Equipment Integrated System of Telecontrol Robot”の略である。
| 寸法(外形) | 長さ:1250mm、幅700mm、高さ1300mm |
|---|---|
| 質量 | 440kg |
| 移動方式 | 対地自動追従式独立4クローラー式 |
| 移動速度 | 2km/時 |
| 走行性能 | 傾斜40度、段差220mmまでの階段昇降、不整地走行、狭い場所の走行 |
| 通信 | 無線・有線の選択(無線時はバッテリーで2時間稼働) |
| ロボットアーム | 7軸アームを2本搭載。1本当たりの可搬質量15kg |
| 表1 MHI−MEISTeRの主な仕様 | |
MHI−MEISTeRのベースとなっているのは、東海村JCO臨界事故(1999年)を機に、日本原子力研究所(現:日本原子力研究開発機構)と同社が共同開発した、耐環境型ロボット(通称:Rabot)である。MHI−MEISTeRは、このRabotの姉妹機として製作していた社内用ロボット(MARS−D)に、原子力施設のメンテナンス現場で培った技術を組み込み、原子炉建屋内で活動できるよう改良(耐放射線性能や遠隔操縦性の向上)を加えたものだ。
従来の災害対応ロボットの多くは、カメラによる点検・監視が主な役割であったが、MHI−MEISTeRはロボットアームの先端ツールを交換することで、除染やコンクリートのサンプリング、障害物の切断など、さまざまな作業が行える。

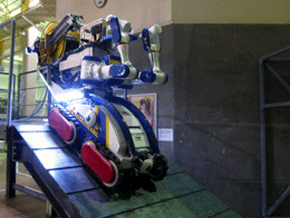 社内検証時の写真。左は、壁面コンクリートコアサンプリング。右は、スロープ走行試験の様子である
社内検証時の写真。左は、壁面コンクリートコアサンプリング。右は、スロープ走行試験の様子である今後、MHI−MEISTeRは、福島第一原発2号機にも投入され、オペレーティングフロアのコンクリートコアサンプリングを実施する計画。同社は引き続き、高機能な遠隔作業ロボットや各種先端ツールの開発を進め、福島第一原発などでの多様なニーズに対応していくという。なお、同社は、新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」の一環で、高所作業用遠隔操作ロボット「MHI-Super Giraffe」の開発も手掛けている(関連記事:クビを長〜くして待つ三菱重工の原発向けキリンロボ、活躍はまだ先か?)。
ロボット開発の最前線

関連記事
 2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」
2本のアームが穴をあけ・切断し・モノをどかす――三菱重工業の原発ロボ「MHI−MEISTeR」
三菱重工業は、人が近づけないような災害・事故現場を自由に移動し、2本のロボットアームで点検/保守・補修などが行える遠隔作業ロボット「MHI−MEISTeR(マイスター)」を開発した。 クビを長〜くして待つ三菱重工の原発向けキリンロボ、活躍はまだ先か?
クビを長〜くして待つ三菱重工の原発向けキリンロボ、活躍はまだ先か?
三菱重工業は「危機管理産業展(RISCON TOKYO)2013」に出展し、福島第一原子力発電所の原子炉建屋内での活用を想定して開発が進められてきた、高所作業用遠隔操作ロボット「MHI-Super Giraffe」を披露した。 オールジャパンで挑む災害対策ロボット開発、実用化への道は?
オールジャパンで挑む災害対策ロボット開発、実用化への道は?
東日本大震災および東京電力・福島第一原子力発電所の事故発生当初、われわれに突き付けられたのは「日本の災害対策ロボットは実用レベルに達していない」という現実だった。あれから2年――。新エネルギー・産業技術総合開発機構(NEDO)の「災害対応無人化システム研究開発プロジェクト」の下、開発を進めてきた最新鋭の国産災害対策ロボット技術がプロジェクト完了を受けて一斉公開された。技術・運用面での課題はクリアできているのか? そして、実用への道は開けるのか?
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。