
有限要素法入門 〜要素剛性マトリクスの導出〜:CAEを正しく使い疲労強度計算と有機的につなげる(4)(3/7 ページ)
» 2024年05月20日 09時00分 公開
[高橋良一/RTデザインラボ 代表,MONOist]
連載第3回で説明した「変位−ひずみマトリクス[B]」と「応力−ひずみマトリクス[D]」を使って、仮想変位のひずみ、本当のひずみおよび本当の応力は次式で表されます。
式18右辺に、式19を代入します。
 式20
式20転置マトリクスの公式を使います。次式です。
 式22
式22{δ*}T、{u}、hは座標(x,y)の関数ではないので積分の外に出します。
 式23
式23上式を使うと式18は次式となります。
 式24
式24{δ*}Tを取り除き、左辺と右辺を入れ替えます。
 式25
式25式11を再掲します。
式25と式11を見ると、要素剛性マトリクスは次式で求まります(参考文献[1])。
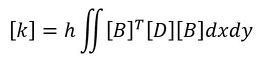 式26
式263次元問題の場合は次式となります。
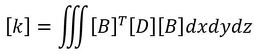 式27
式27何だか狐につままれた感じで要素剛性マトリクスが導けました。式26、式27は1次要素、2次要素でも同じです。以上で有限要素法の説明は終わりです。「レーレー法」の説明を除くとA4用紙20ページちょっとになりました。これで有限要素法プログラムが作れるはずです。
仮想仕事の原理がピンとこないときは、「エネルギー最小の原理」からでも要素剛性マトリクスが導出できます(参考文献[2])。手順は長いですがしっくりくるかと思います。
式26は2次元平面応力要素ですが、これに板の曲げ理論を追加すると初期の3次元シェル要素になり、3次元解析が可能になります。かつては3次元ソリッド要素よりもシェル要素の方が出番が多かったと思います。
参考文献:
- [1]三好|有限要素法入門|培風館(S53)
- [2]戸川|有限要素法概論|培風館(S56)
Copyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
メカ設計の記事ランキング
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 使用中に発火、サーキュレーター10万台をリコール
- 【レベル14】生成AIを味方に、3D CADを使いこなそう!
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- 営業製作所、図面管理システム「ジーエン図面」の販路拡大へSB C&Sと契約
Special SitePR







あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。