
有限要素法入門 〜要素剛性マトリクスの導出〜:CAEを正しく使い疲労強度計算と有機的につなげる(4)(1/7 ページ)
金属疲労を起こした際にかかる対策コストは膨大なものになる。連載「CAEを正しく使い疲労強度計算と有機的につなげる」では、CAEを正しく使いこなし、その解析結果から疲労破壊の有無を予測するアプローチを解説する。連載第4回は、前回に引き続き「有限要素法」について解説する。
今回お届けする連載第4回で「有限要素法」の解説はひとまず終了となります。何のために解説しているのかというと、2次要素(中間節点あり)と1次要素(中間節点なし)の計算精度の違いを説明するためです。
要素剛性マトリクスの導出:仮想仕事の原理
「仮想仕事の原理」はいろいろありますが、ここでは弾性変形問題を解くための仮想仕事の原理を使います。言葉で表現すると以下となります。
1つの質点が、これに働くいくつかの力の作用の下でつり合い状態にあるとき、この質点に微小な仮想変位を与えても、質点に働いている全ての力がこの仮想変位によってなす仕事の総和はゼロである。
仮想仕事の原理の説明のために、弾性変形している物体に蓄えられているエネルギーを求めましょう。図1に長さLx、Ly、Lzの直方体に、x方向にFxの外力が作用し、x方向にδx伸びた状態を示します。

ヤング率の定義から、Fxとδxの関係は次式ですね。
 式1
式1 式2
式2弾性変形の最終時の荷重と変位をFx final、δx finalと表記します。伸び量がゼロからδx finalまで変化したときに外力がした仕事Wは次式となります。
 式3
式3式2に最終時の荷重と変位を代入して変形します。
 式4
式4 式5
式5式5を式3に代入し、応力とひずみの定義式も代入します。

式6を体積で割れば弾性体に蓄えられている単位体積当たりのエネルギーとなります。体積はLxLyLzですね。添字finalを取り除いて単位体積当たりのエネルギーは次式となります。
 式7
式7エネルギーは最終時の応力と変位の積の2分の1と覚えておいてください。図2に弾性変形する物体に外力Pと物体力Fが作用している状態を示します。外力Pはベクトル量で単位面積当たりの力、物体力Fは単位体積当たりの力とします。物体力Fは自重のようなものです。

変位をδu、δv、δwと表記すれば、蓄えられるエネルギーは最終時の力と変位の積の2分の1倍であることを考慮して、外力と物体力による仕事量は次式となります。
 式8
式8では、仮想変位の原理を式にしましょう。「全ての仕事の総和はゼロ」でした。全ての項に2分の1が付くのでこれは消去します。

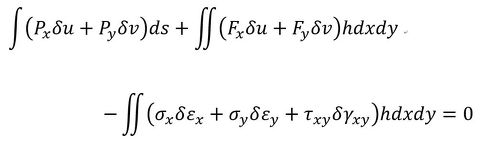 式9-2D
式9-2D式9-3Dは3次元問題の式で、式9-2Dは2次元問題の式です。以降は、式9-2Dを使います。式9-2Dの第1項は物体表面の線積分、第2項と第3項の物体の面積分です。hは三角形要素の板厚です。δu、δvは仮想変位です。「何、この式!?」と思われたでしょうが、筆者は今でもそう思っています(仮想変位の原理に対するボヤキは後述します)。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- 幾何公差の基準「データム」を理解しよう
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。