ヒトの歩く走るを数理モデル化、7つのパラメータで制御可能:医療技術ニュース
京都大学は、脳神経・筋・骨格系の数理モデルを用いて、人が歩き、走るための脳神経の制御様式を数理的に解明した。シミュレーションの結果、制御パラメーターのうち7つのパラメーターを変化させるだけで、歩行・走行とも実現できた。
京都大学は2019年1月24日、脳神経・筋・骨格系の数理モデルを用いて、人が歩き、走るための脳神経の制御様式を数理的に解明したと発表した。同大学工学研究科 講師の青井伸也氏が、IRCCSサンタルチア財団、東京大学、電気通信大学との共同研究で明らかにした。
人の動作を理解する上で、脳神経が運動に応じた筋の組み合せと活動パターン(筋シナジー)を複数用意し、それらを介して制御する「筋シナジー」という考え方が提唱されている。この考えに沿って歩行と走行の筋活動を計測すると、5つの筋の組み合せと活動パターンでほとんどの筋活動を説明できる。また、この組み合せと活動パターンは、歩行と走行で共通するものが多い。
研究グループは、5つの筋の組み合せと活動パターンを用いて、69個のパラメーターを持つ脳神経の制御モデルを構築。他に、頭と腕を含めた体幹1リンクと、左右の脚の大腿、下腿、足の6リンクからなる骨格、片脚に歩行と走行に主要な9つの筋肉を用いた筋と骨格の数理モデルを構築した。
さらに、これらの脳神経の制御モデルと筋・骨格モデルを統合した動力学シミュレーションを実施。その結果、制御パラメーターのうち7つのパラメーターを変化させるだけで、歩行・走行とも実現できた。また、7つの制御パラメーターを変えるだけで、歩行・走行とも一定の範囲で速度を変化させることができた。
今後、歩行と走行の制御様式の理解が深まることで、運動能力やコーチングの向上など、スポーツ科学への寄与が期待される。将来的には、筋シナジーに基づく治療やリハビリテーション法の開発など医療への応用、多数の関節を持つロボット、運動支援の外骨格ロボット制御など、工学的な応用も見込まれる。

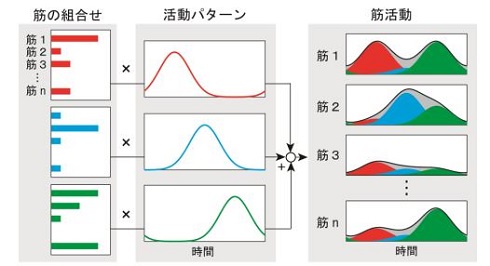 筋の組み合せと活動パターン(筋シナジー)で説明される筋活動。図は、3つの組み合せと活動パターンの例 出典:京都大学
筋の組み合せと活動パターン(筋シナジー)で説明される筋活動。図は、3つの組み合せと活動パターンの例 出典:京都大学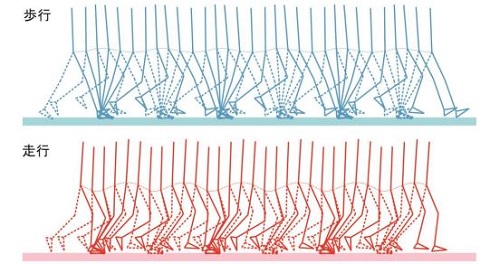 数理モデルの歩行(上)と走行(下)の様子
数理モデルの歩行(上)と走行(下)の様子- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- オリゴヌクレオチドを高速に鎖伸長できる新しい化学合成法を開発
- 北中米W杯をウェルビーイングのテストベッドとするトロントのレガシー
- 「記憶があるのに思い出せない」はなぜ? 脳の神経活動のゆらぎが関係か
- 紫外線による肌の老化連鎖を抑制、シワを防ぐ微細藻類の成分を発見
- 医学生の臨床能力試験を首掛けカメラで評価、将来的な評価補助ツールへ
関連記事
 ヒトの脳全体をシミュレーション、1秒間の神経回路の処理を5分で再現
ヒトの脳全体をシミュレーション、1秒間の神経回路の処理を5分で再現
理化学研究所は、次世代スーパーコンピュータで、ヒトの脳全体の神経回路のシミュレーションができるアルゴリズムの開発に成功した。メモリを省力化し、既存のスパコン上での脳シミュレーションを高速化できた。 映像を見て感じた内容を脳から言語化する脳情報デコーディング技術を開発
映像を見て感じた内容を脳から言語化する脳情報デコーディング技術を開発
NICT脳情報通信融合研究センターは、映像を見て感じた「物体・動作・印象」の内容を、脳活動を解読して1万語の「名詞・動詞・形容詞」の形で言語化する脳情報デコーディング技術の開発に成功した。 トヨタの仮想人体モデルに新バージョン、姿勢変化と骨や内臓の障害を同時解析
トヨタの仮想人体モデルに新バージョン、姿勢変化と骨や内臓の障害を同時解析
トヨタ自動車は2019年2月8日、衝突事故発生時の乗員や歩行者を再現するバーチャル人体モデル「THUMS」を改良し、バージョン6として発売したと発表した。最新バージョンでは、乗員の姿勢変化と、衝突時の骨や内臓の傷害を同時に解析することが可能になった。JSOLと日本イーエスアイを通じて販売する。 快適さをシミュレーションする、東洋紡の着衣解析の取り組み
快適さをシミュレーションする、東洋紡の着衣解析の取り組み
東洋紡の快適性工学センターでは、衣服の快適性について科学的な側面から取り組んでいる。今回、有限要素法により人体モデルに服を着せて動かした状態の衣服圧をシミュレーションし、導電性材料を利用した心電図を測定できるスマートウェアの開発に成功した。 インプラント設計などに有用、3D人体モデルの作成/解析ツール
インプラント設計などに有用、3D人体モデルの作成/解析ツール
JSOLは、X線CTやMRIなどから得られる人体のデータをもとに3Dモデルを作成することができる3次元画像データ変換ツール/サーフェイスメッシュジェネレータ「Simpleware」のデモ展示を行った。また、Simplewareにアドオンして構造解析を行うための変形/応力解析ソフトウェア「+CAE」も紹介した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 日本人の骨格に合わせて設計、上腕骨折用の治療システムを提供開始
- 気温45℃でも15℃を維持、冷却性能が1.6倍になった水冷ウェアを開発
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。