PC上の「Grbl Controller」からステッピングモーターを操る:Arduinoで学ぶ基礎からのモーター制御(12)(1/3 ページ)
今回は、ファームウェアウェア「Grbl」とペアになって動くPCソフトウェア「Grbl Controller」を使って、ステッピングモーターを制御していきます。また、記事後半ではG-CODEのプログラミングにも挑戦します。
はじめに
「Grbl Controller」はArduinoで動作するファームウェア「Grbl」(以下、Grblファーム)とペアになって動くPC側のソフトウェアです。これによりPC上のGUI(グラフィカルユーザーインタフェース)でさまざまな設定や操作が可能になります。Grblファームとともにオープンソース系の3DプリンタやCNCでは最もポピューラーなソフトウェアの1つです。今回はこのソフトウェアを使ってステッピングモーターの制御を行います。また後半ではG-CODEのプログラミングにも挑戦したいと思います。
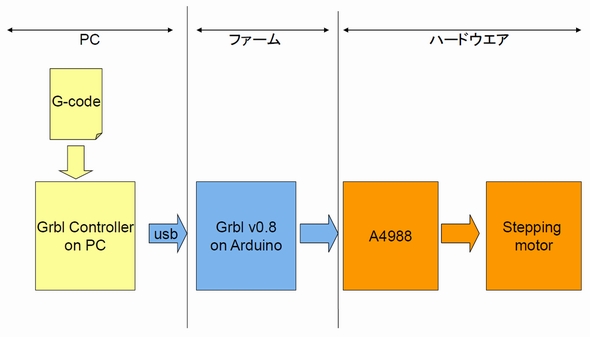 図1:本連載で紹介するハード/ソフトウェア構成イメージ
図1:本連載で紹介するハード/ソフトウェア構成イメージ連載:Arduinoで学ぶ基礎からのモーター制御
・(11):オープンソースのCAMソフトGrblでステッピングモーターを回してみる
・(10):マイコン1つで複数モーターを操る、制御モジュール「A4988」を学ぶ
・(9):定番IC「TA7291A」でバイポーラ型ステッピングモーターを駆動する
・(1):「マイコンによるモーター制御」を学ぶ前に知っておくべきこと
ボールねじ直動機構
今回はステッピングモーターを制御して指定した軸方向に正確にペイロードを移動させてみます。そのためには何らかの検証をする機構が必要です。そこで筆者が試作中のCNCの一部であるボールねじ直動機構を使います。この連載はCNCを自作することが目的ではないので、ボールねじ直動機構の簡単な原理とこの後パラメーターを設定する際に必要になる仕様の提示にとどめたいと思います。
通常ボルトとナットの関係はナットを固定してボルトを回してネジを絞めたり外したりする使い方なのですが、ナット側を移動させたい負荷(ペイロード)に固定します。そこにボルト(ボールねじ)を通し、ボルトの位置は固定したまま回転させます。するとナットに固定された負荷が直線的に移動します。これを利用したものがボールねじ直動機構です。今回はこのボールねじ直動機構の1軸だけを使ってGrbl Controllerを説明します。
図2が今回の実験に使うボールねじ直動機構の写真です。

ステッピングモーターが回ればそれに取り付けられたボールねじが回り、アルミフレームで作られたステージが左右に動く仕組みです。ステッピングモーター自体はユニポーラ型ですが、6端子のうち4端子のみを使ってバイポーラ型として使っています。ちなみにコイルの両端の抵抗は約12Ωでこれに12Vをかけて駆動します。
図3はステッピングモーターの軸とボールねじの接合箇所の写真です。

ステッピングモーターの軸の直径は5mmなのですが、ボールねじは6mm径です。そこで軸径を変換するカプラーを入れています。ちなみに6mm径のネジは精密機械用のボールネジではなく一般のホームセンターなどで入手可能な長ネジを使っています。実は6mm径のボールねじを使うのには理由があって、ネジのピッチが1回転でちょうど1mmになるためです。この値はあとで必要になりますので記憶しておいてください。
ステッピングモーターの軸径が5mmのものが多いのに、なぜかCNCや3Dプリンタのボールねじは6mmが多いことに疑問を感じていましたが、これが理由のようです。
図4はボールねじ直動機構の可動部であるステージを裏から写した写真です。


ボールねじにかぶさっていてステージの側面にねじ止めされているアクリルの三角形の板があります。この間にポリカーボネートの6mmのナットが仕込まれています。これによりボールねじの回転でステージが移動します。
ボールねじの代わりにベルトが用いられる場合もあります。これらの直動機構は3DプリンタやCNCの最も基本的なユニットです。
図5のように直動機構3つをX軸、Y軸、Z軸と組み合わせることで3DプリンタやCNCを作製することができます。
関連記事
 オープンソースのCAMソフトGrblでステッピングモーターを回してみる
オープンソースのCAMソフトGrblでステッピングモーターを回してみる
今回は、3DプリンタやCNCで定番の制御ファームウエアとなっているオープンソース「Grbl」を使って、ステッピングモーターを制御します。 マイコン1つで複数モーターを操る、制御モジュール「A4988」を学ぶ
マイコン1つで複数モーターを操る、制御モジュール「A4988」を学ぶ
ステッピングモーターに制御用ドライバモジュールを組み合わせると、用途の幅がグッと広がります。今回は3Dプリンタなどで、バイポーラ型ステッピングモーターの制御モジュールとしてよく利用されている「A4988」の扱いを学びます。 定番IC「TA7291A」でバイポーラ型ステッピングモーターを駆動する
定番IC「TA7291A」でバイポーラ型ステッピングモーターを駆動する
ステッピングモーターを制御する時、トランジスタで回路を組んでもよいのですが、制御用ICなどを用いる方が便利です。今回は定番IC「TA7291A」でバイポーラ型ステッピングモーターを制御します。 バイポーラ型ステッピングモーターの制御
バイポーラ型ステッピングモーターの制御
精密制御に欠かせないステッピングモーター。今回はバイポーラ型ステッピングモーターについて、その制御をマイコン(Arduino)から行います。 ステッピングモーターの制御
ステッピングモーターの制御
前回までは“マブチモーター”に代表される「直流ブラシ付きモーター」を、マイコン(Arduino)で制御する方法を紹介してきました。今回からは「ステッピングモーター」の制御に取り組みます。 PWMを使ったサーボモーターの制御
PWMを使ったサーボモーターの制御
ラジコンカーのステアリングやロボットの関節などに用いられ、角度を指定して動かす機能を持つのが「サーボモーター」です。今回はArduinoからこのサーボモーターの制御をPWMを用いて行う手法を紹介します。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- 日本再起の旗印となるか、国産マルチモーダルAI基盤「FRONTia」が始動
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- TSMCの“Beyond 2nm”技術の現在地、「A14」で第2世代ナノシートトランジスタへ
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 既設光ファイバーで450Tbps伝送に成功、周波数帯域幅を従来の4倍以上に拡大
- イチから全部作ってみよう(34)マルチプログラミングとトランザクション
- NVIDIAフアン氏が神田に現る――日本製造業巻き込む「ジャパンAI協業」祭り
- NVIDIAが「Jetson Thor」に新モジュール追加、高騰するメモリの使用量削減技術も
- インテグレーション地獄からの脱却:構造問題と「インテグレーター人権宣言」
- AIで脆弱性影響調査を自動化、管理工数を約70%削減
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。