「マイコンによるモーター制御」を学ぶ前に知っておくべきこと:Arduinoで学ぶ基礎からのモーター制御(1)(2/2 ページ)
マイコンによるモーター制御
本連載ではマイコンを用いて、で紹介した各モーターに対応したプログラミングを行っていくわけですが、マイコン開発環境は多くの読者におなじみのArduinoを用います。本連載ではサンプルのスケッチ(プログラム)を示して解説を行いますので、LED点滅のプログラミングができる程度の知識が必要です。Arduinoの基本的な使い方については、MONOistにも記事がたくさんありますのでそちらを参考にしてください。
- ボクだけの「エア彼女」をMP3プレーヤーシールドで自作しよう!
- サーボモータを活用してオリジナル「自動給餌器」を作ろう!
- 感圧センサーで、「もぐらたたきみたいな(?)ゲーム」を作ってみた
- 「Intel Galileo」ファーストインプレッション
- スイッチを使ってタイマーを制御――「運動しなさい! 電光掲示板」がついに完成!!
- Arduinoがあなたのトレーナーに――「運動しなさい! 電光掲示板」を作る
- 白黒なのにカラーに見える!? モーターを制御して「ベンハムのコマ」を作ろう!
- 暗い夜道でも安心な「歩くと光る!? キラキラLEDバッグ」を作ろう!
- 秋の夜長をロマンチックに―― 「フルカラーLED調光ランプ」を作ろう!
- ハラハラドキドキ「うさぎさん危機一髪ゲーム」を作ろう!
- 厳しい残暑を「熱中症対策センサー」で乗り切ろう!
- 親子で楽しむ夏休み自由研究――2つのLEDで「アニメシアター」を作ろう!
- お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
Arduinoといえば最もポピュラーなのがUNOタイプですが、本稿では小型でブレッドボードに直接挿せるタイプのNanoを用います。ピンはほぼ互換ですのでUNOタイプでもそのまま使えるとは思いますが、これから購入しようと思う方はNanoタイプをお薦めします。実態配線図などはNanoを前提としたものを案内する予定です。

- よく使う部品など
本連載では上に示したようなモーターをマイコンから制御する方法を解説していきますが、最も基本的な半導体デバイスであるトランジスタやFET(電界効果トランジスタ)を用いて、モーターを制御する回路を基本的なところから作製します。
専用ICやモジュールを使えば簡単にモーターを制御することは可能ですが、それではモーターが動く仕組みまでは理解できません。またうまく動作しなかったとき、どこが原因なのか追究することもできないでしょう。応用に結びつけるため、基礎を学んでいきたいと思います。
 トランジスタ(写真=左)とFET(写真=右)
トランジスタ(写真=左)とFET(写真=右)- トランジスタとFET
トランジスタは半導体の最も基本的なデバイスの1つで、一般にトランジスタと云えばバイポーラトランジスタを指します。モーター制御用の専用ICであっても、トランジスタなどで組んだ回路を集積して1つのICとしてパッケージングしているだけです。ですからトランジスタさえあれば、それらの組み合わせでモーター制御用の専用ICの代わりになる回路を作製することが可能なのです。
トランジスタは電流の増幅作用があります。マイコンのGPIO(汎用入出力)端子ではLEDを点灯させる程度の電流しか出力できませんが、一般的にモーターの駆動にはそれの数十から数百倍の電流が必要です。そのためにGPIOの電流をトランジスタで増幅させ、モーターを駆動させます。
FETは電界効果トランジスタとも呼ばれます(先ほどのバイポーラトランジスタに対してユニポーラトランジスタと呼ぶこともあります)。
FETもトランジスタと同様、モーター駆動に必要な電流を供給するために用いられますが、バイポーラトランジスタが電流でモーター(負荷)駆動する電流を制御するのに対して、FETは電圧でモーター(負荷)に流す電流を制御します。本連載では比較的大電流が必要な場合にFETを用います。
- ブレッドボード
ブレッドボードも利用します。はんだ付けなしでも回路製作が可能であり、回路の改変も容易です。回路を実験する場合、部品を変更して最適な部品の組み合わせを試すときなどにとても便利です。部品の再利用も可能ですからとても経済的です。
ブレッドボードには行方向に数字、列方向にアルファベットが割り当てられています。本連載では、この行の数字と列のアルファベットを組み合わせてブレッドボードの穴の位置を特定します。(1 a)と表示すれば写真だと左上の穴を指示したことになります。
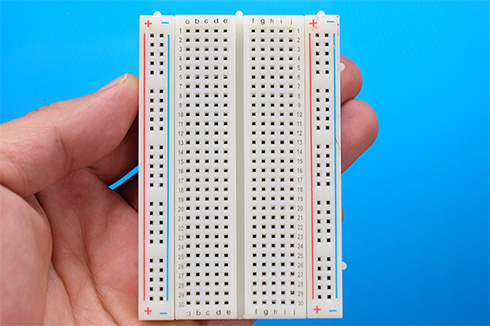 ブレッドボード
ブレッドボードブレッドボードはあらかじめ内部で配線が施されています。(1 j)(1 i)(1 h)(1 g)(1 f)の各5つの穴は互いに内部で配線されています。それが(30 j)(30 i)(30 h)(30 g)(30 f)まで同様に配線されています。図の溝を挟んで下の面も同じように配線されています。図の上下に赤いラインと青いラインがありますが、それらはそれぞれ列方向が互いに配線されています。これらの列は主に電源として用いるられることが一般的です。
今回は実際にマイコンでモーター制御を行うにあたり、扱う予定のモーターと利用する電子デバイスについても簡単に説明しました。次回から実際にモーター制御を行う回路とプログラムについて解説していきます。
第一弾は最も安価で入手可能な「直流ブラシ付きモーター」のマイコン制御について解説します。お楽しみに。(次回へ続く)
関連記事
 ステッピングモータの仕組みと制御のコツ
ステッピングモータの仕組みと制御のコツ
パルス電力を与えるごとに一定の角度だけ回転するステッピングモータ。3種類の制御信号、PLDとの協調などを解説しよう。 モータ制御に欠かせない技術“PWM”って何?
モータ制御に欠かせない技術“PWM”って何?
マイコンから電圧を変化させてモータの速度を変えるのは非常に効率が悪い。そこで周期的なパルス信号を発生させるPWMの登場となる。 PWMを利用したDCモータ制御プログラミング
PWMを利用したDCモータ制御プログラミング
PWM制御を利用してモータを回すには何が必要か? 回転速度、回転方向、ブレーキを制御するプログラムと併せて解説する。 PWMを利用したサーボモータ制御プログラミング
PWMを利用したサーボモータ制御プログラミング
PWMを利用したモータ制御の仕上げとして、ロボットの関節などに使われるサーボモータのプログラミングを解説する。 お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
お手軽モノづくり体験――「あったらいいな」をArduinoでカタチにしてみよう!
「こんなモノがあったらいいのに……」をArduino(アルドゥイーノ)で実現。電子工作初心者や回路の知識のない人だって大丈夫。筆者と一緒に、頭の中のアイデアをカタチにし、モノづくりの喜びや難しさを体験・体感してみよう! 第1回では、開発環境の準備と電子工作の“Hello World”こと、「エルチカ」に挑戦するぞ!!
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。