ソニーがイメージセンサーで次に起こすブレイクスルー:小寺信良が見た革新製品の舞台裏(4)(5/5 ページ)
IoT時代のイメージングのキーになる積層化技術
―― 2012年に積層型CMOSイメージセンサーを開発されました。同年Exmor RSとして、スマートフォン向けイメージセンサーが製品化されていくわけですけど、今後積層型がセンサーの主流になっていくんでしょうか。
大場 スマートフォンではそうですね。ただ全ての製品でそうなってくるわけではありません。積層型って分かりやすくいうと、画素と同じ面積の回路チップがいるわけじゃないですか。それだけの回路が必要ないユースケースもあるんですよね。そうするとコストばっかりかかっちゃうんですよ。基本的には用途によってということになります。
ただわれわれも積層を使った新たな価値提案をしていくので、トレンドとしては増えていくと思います。
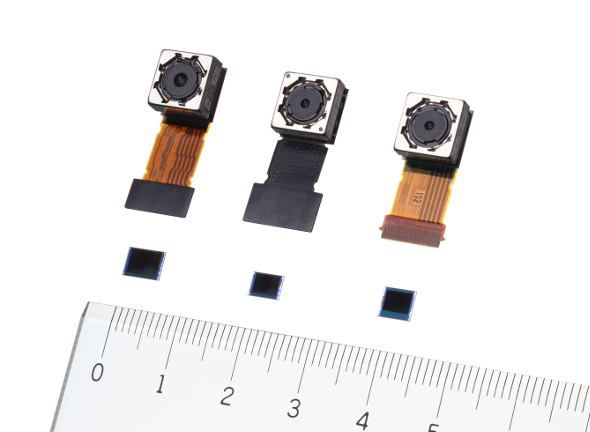 2012年に発表された「Exmor RS」シリーズ。写真上段がイメージングモジュールで左から「IU135F3-Z」「IU134F9-Z」「IUS014F-Z」。写真下段が積層型CMOSイメージセンサー“Exmor RS”で左から「IMX135」「IMX134」「ISX014」 出典:ソニー
2012年に発表された「Exmor RS」シリーズ。写真上段がイメージングモジュールで左から「IU135F3-Z」「IU134F9-Z」「IUS014F-Z」。写真下段が積層型CMOSイメージセンサー“Exmor RS”で左から「IMX135」「IMX134」「ISX014」 出典:ソニーIoT時代に向けた用途拡大へ
―― Exmor RSがデジタルカメラに搭載されたのは2015年の夏、「RX10 II」と「RX100 IV」からということになります。これがいわゆる価値提案を狙った商品と。
 積層型CMOSによる新たな価値提案を狙ったデジタルカメラ「RX10 II」
積層型CMOSによる新たな価値提案を狙ったデジタルカメラ「RX10 II」大場 この2つは一つの試金石で、1000フレームの世界というのをわれわれ提案してるんですよね。これの反響、あるいはこれに触発されて新たなアプリケーションが出てくるというところを期待して、ソニーグループとして仕掛けたというところです。
大木 複雑な映像を作るために、後ろのプロセッサーとの連携みたいなことも増えていくんじゃないかと思うんですけど、その時に積層型だと、ある程度センサー側で処理ができる。今後イメージングシステムとしてこれを有効に使うということが、自由度がでて、いろんなことができていくという。そういうことも一つのトレンドかもしれないなと考えています。
例えば画像処理の世界でいうと、ベースの情報量はすごくたくさん取れるように用意しておいて、でも必要な部分を切り取って使うという方向になります。これはある程度センサー側で処理してあげた方が、システムの負荷が軽減するので、積層型を利用してセンサー側に一部の処理を乗っけてあげる。伝送負荷を軽くしてあげて後ろのプロセッサーで最適な処理をやるという、バランスの良いシステムを作るという発想は出てくると思うんですよね。
大場 これからIoT的な文脈でいろんなものにカメラが付くと実に面白くなってくると思うんです。例えば自立型ロボット。自動走行の車なんかも含めて、ほとんどのロボットにイメージングシステムを使っていくと思うんですよね。その時に、このままだと間違いなくネットワークとかサーバのインフラってパンクするんですよ。
そうならないように、エッジ側のシステムでどこまでインテリジェントなことをやるか。そのエッジ側って言った時に、イメージセンサーとプロセッサーがあって、じゃあセンサーで処理ができるから積層型の方がいいね、という方向性ができてくるんです。そういう議論にこれからどんどんなっていくと思いますね。
―― 車は高額商品ですし安全に関わる技術ですから、少しぐらいセンサーが高くてもやるんでしょうが、ウェアラブル方向のIoTでは、センサー選びもお値段次第なんじゃないかと。
大場 コストに関してはおっしゃる通りです。ただセンサー側の処理によって複雑なシステムをシンプルにできると、トータルとしてはコストが下がる。その中でセンサーの付加価値を上げていくというのが、われわれが狙うべき領域なんです。全体の経済合理性がないと、絶対に普及しませんしね。
筆者紹介


小寺信良(こでら のぶよし)
映像系エンジニア/アナリスト。テレビ番組の編集者としてバラエティ、報道、コマーシャルなどを手がけたのち、CGアーティストとして独立。そのユニークな文章と鋭いツッコミが人気を博し、さまざまな媒体で執筆活動を行っている。
Twitterアカウントは@Nob_Kodera
近著:「USTREAMがメディアを変える」(ちくま新書)
関連記事
 老舗が生んだ革新、“全天球カメラ”誕生の舞台裏
老舗が生んだ革新、“全天球カメラ”誕生の舞台裏
“360度の空間を撮影するカメラ”として新たな市場を切り開くリコーの全天球カメラ「RICOH THETA」。そのアイデアはどこから生まれ、そしてそれを形にするにはどんな苦労があったのだろうか。革新製品の生まれた舞台裏を小寺信良氏が伝える。 ソニー、積層型CMOSイメージセンサーの増産に350億円投資
ソニー、積層型CMOSイメージセンサーの増産に350億円投資
ソニーは、積層型CMOSイメージセンサーの生産能力増強を目的とした設備投資を、2014年10月から2015年9月にかけて行うことを発表した。 メイドインジャパンの必勝パターンを読み解く
メイドインジャパンの必勝パターンを読み解く
2012年4月からスタートした「小寺信良が見たモノづくりの現場」では、10カ所の工場を紹介した。今回から2回にわたり、この連載で得た「気付き」から、「ニッポンのモノづくりの強み」についてまとめる。 “出血”が止まりつつあるソニーに忍び寄る、為替と“1本足打法”のリスク
“出血”が止まりつつあるソニーに忍び寄る、為替と“1本足打法”のリスク
ソニーは2015年3月期(2014年度)の決算を発表し、課題事業が着実に回復傾向を見せ始めていることを示した。成長へのシフトチェンジを目指す中で、リスクとして2つのポイントが浮上してきている。- テーマサイト「イノベーションのレシピ」
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
製造マネジメントの記事ランキング
- 「環境に良いことしかやらない」 MIRAI-LABOはなぜ独自製品を生み出せるのか
- マツダのモータースポーツの“聖地”は深川に、新たなブランド体験拠点を開設
- 地震、台風、有事の寸断――日本のサプライチェーン危機管理を変えるとき
- 自動車14社が参画、CLOとAI連携で“フィジカルインターネット”実現へ
- 三井不動産がデータセンターに6000億円超投資、物流の枠超え「産業デベロッパー」へ
- データはあるのになぜ使えない? 日本の製造業に必要な「データ活用基盤」
- 投資は多いのに稼げない、日本製造業の投資先を分析する
- 現場が求めるAIと、ITベンダーが提案するAIの「ズレ」
- 見えない仕事を可視化する「自己申告法」と間接業務を効率化する「帳票分析法」
- USBメモリだけではない、身近なUSB機器に潜むリスク
コーナーリンク





![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。