現場/経営の“省力化”に役立つ助力装置とは何か【実験編】:現場/経営の“省力化”に役立つ助力装置とは何か(2)(2/2 ページ)
姿勢負荷を改善するための施策〜エルゴノミクス製品の利活用
これまでKIM法の観点を基に、いくつかの作業姿勢例を見ながら負荷度合いを比較してきましたが、それぞれのシチュエーションで身体負荷を低減するにはどのような方策があるでしょうか。
 助力装置の機能拡張の例:補助アーム付きハンド 出典:シュマルツ
助力装置の機能拡張の例:補助アーム付きハンド 出典:シュマルツ1つには、作業者が作業を行う位置を、腰より高く/肩より低い位置に調整することが挙げられます。できる限り腰を曲げた姿勢を維持しない、できる限り頭上作業や座り込みなどを避ける、というKIM法の指針にならうように、作業環境を改善していくことになります。
もう1つには、助力装置の構造や配置を工夫することで、現環境に存在するギャップを埋めることが挙げられます。ここで、装置構造の工夫(右図、補助アーム付きハンド)が奏功する例を示します。
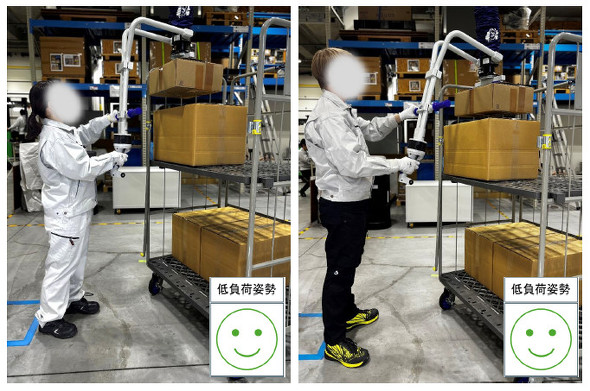
姿勢比較5:カゴ車積み付け作業(補助アーム使用)
補助アーム付きハンドを使用することで、姿勢負荷を低くならしつつも、同じ作業成果を得ることができるケースがあります。
先に述べた姿勢比較2と同等以上の作業難度になるわけですが、補助アームの調整シロのおかげで体格差をマージしつつ搬送が可能であり、この時KIM法での評点も低く抑えることができます。
 姿勢比較5:カゴ車積み付け作業(補助アーム使用)
姿勢比較5:カゴ車積み付け作業(補助アーム使用)姿勢比較6:パレット底面への積み付け作業(補助アーム使用)
体格に関係なく高負荷となる作業においても、補助アーム付きハンドを用いることで負荷低減を図ることができます。
補助アームによって、体格差に関係なく正立姿勢を崩さずにアプローチできるようになり、負荷低減を実現しつつ同じ作業成果を得ることができます。腰折れや屈伸が不要なこと、同時に頭上作業や腕の伸展も不要なことから、KIM法に照らしても評点は低く抑えられ、理想的な負荷量と評価することができます。
 姿勢比較6:パレット底面への積み付け作業(補助アーム使用)
姿勢比較6:パレット底面への積み付け作業(補助アーム使用)欧州では構内歩車分離のために床レベルが分かれているケースがあり、作業者が立つ床レベルに対してパレット面がそれよりも低いような状況もまま見られます。姿勢負荷を考慮しなければ、ベーシックな助力装置を使って積み付けることはできなくはありませんが、身体にやさしくありません。補助アーム付きハンドを用いればこのような場合でも姿勢負荷を高めずに積み付けが可能です。

 補助アームによる作業範囲の拡張例 出典:シュマルツ
補助アームによる作業範囲の拡張例 出典:シュマルツここで紹介した補助アーム付きハンドは一例であって、万能というわけではありません。人間工学に基づいて設計された製品は各社からリリースされていますので、適用環境に合わせて選択してみてください。
まとめ
作業者の負荷低減を考えた場合、より本質的には、荷重負荷だけでなく姿勢負荷にも注目して、統合的な作業分析を行うことが必要といえます。
今回は、作業者にかかる作業負荷、姿勢負荷を真正面から捉える方法として、より進歩的なドイツのKIM法(KIM-ABP)について触れ、いくつかの作業姿勢を示しながら、より多くの人にとって負荷が少なくなるような作業姿勢と、そのための工夫を例示しました。
人間工学の観点から一歩踏み込んで作業環境を分析し、工程を設計、改善することは、より多くの人が活躍できる快適な作業環境を構築することにつながると考えます。またそれは、その投資をよりコンパクトに、より効果のあるものにするでしょう。
著者紹介
シュマルツ株式会社 ビジネスディベロップメント
小川尚希(おがわ なおき)
工学修士(感性工学)。信州大学大学院にて介護用装着型アシスト装置や高分子人工筋肉をテーマにメカトロ系・人間工学系領域を専攻。これまでオカムラ(旧岡村製作所)、ルネサスエレクトロニクス他経て、2024年から現職。社のスローガン「重力負荷から人々を解放する」に共鳴しながら、FA/省力用機器の国内マーケティング活動やPSF活動を行っている。
関連記事
 現場/経営の“省力化”に役立つ助力装置とは何か【基本編】
現場/経営の“省力化”に役立つ助力装置とは何か【基本編】
本稿では、製造現場や物流業務における重量物搬送の省力化に役立つ助力装置の概要や、導入する際のリスクアセスメントについて解説します。 クリーンルームで重量物搬送を支援する手動搬送装置、最大100kgまで吸着昇降
クリーンルームで重量物搬送を支援する手動搬送装置、最大100kgまで吸着昇降
シュマルツは、クリーンルームでの重量物搬送を支援する手動搬送ソリューションを発表した。最大100kgまでのワークの吸着と昇降ができる真空バランサーと、ワークを水平移動するジブクレーンで構成される。 隙間があっても吸着搬送、協働ロボットのパレタイジングなど向け軽量ハンド
隙間があっても吸着搬送、協働ロボットのパレタイジングなど向け軽量ハンド
真空機器メーカーのシュマルツは軽可搬ロボットを使用したパレタイジングやデパレタイジング向けの真空グリッパー「ZLW」をリリースした。 コンプレッサー不要で消費電力削減、真空ポンプ内蔵の協働ロボ向け電動吸着ハンド
コンプレッサー不要で消費電力削減、真空ポンプ内蔵の協働ロボ向け電動吸着ハンド
日東工器は、協働ロボットの先端に取り付けた真空ポンプで物品を移動できる、電動吸着ハンド「EVE-500」を発売する。コンプレッサーによるエア供給が不要で、消費電力を8割削減できる。 真空でも稼働する高耐熱仕様の全固体ナトリウムイオン電池を開発
真空でも稼働する高耐熱仕様の全固体ナトリウムイオン電池を開発
日本電気硝子は、「BATTERY JAPAN【春】〜第18回 [国際] 二次電池展〜」に出展し、開発品として高温/真空下で動作する「真空/高耐熱仕様の全固体ナトリウムイオン電池」を披露した。 真空蒸着で金属箔上にリチウムを成膜、次世代バッテリーの開発などに活用
真空蒸着で金属箔上にリチウムを成膜、次世代バッテリーの開発などに活用
アルバックは、金属箔上にリチウムを成膜する巻取式真空蒸着装置「EWK-030」を開発した。真空蒸着は不純物の混入や酸化を抑えられるため、従来の大気環境下でのロールプレス技術より良好な膜表面が得られる。
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。