自律型移動ロボットと運行管理システムの接続インタフェースの仕様を策定:FAニュース
新エネルギー・産業技術総合開発機構は、自律型移動ロボットと運行管理システムを接続するインタフェース「AMR-IF」の仕様を策定し、AMR-IFに準拠した操作端末ソフトウェアのサンプルを公開した。
新エネルギー・産業技術総合開発機構(NEDO)は2020年3月30日、東芝とともに、自律型移動ロボットと運行管理システムを接続するインタフェース「AMR-IF(Autonomous Mobile Robot Interface)」の仕様を策定したと発表した。オープンソースソフトウェアとして、AMR-IFに準拠した操作端末ソフトウェアのサンプルを同日、公開した。
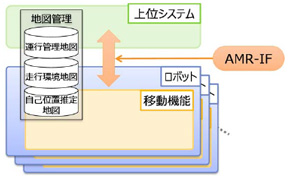
AMR-IFは、移動ロボットの運行管理に必要な地図情報、走行経路指示、ロボットの現在位置情報などの規約を定めたものだ。AMR-IFの仕様に準拠することにより、複数台の移動ロボットの効率的な経路計画の策定や、複数のロボットが同時進入することによる行き詰まりであるデッドロックを回避するなどの運行管理システムを構築できる。
AMR-IFを活用することで、共通のシステムでメーカーや種類が異なる複数の移動ロボットを運用できるため、上位システムを構築するシステムインテグレーターや移動ロボットのメーカーがシステムを開発しやすくなる。
 国際ロボット展に出展した3台の移動ロボット 出典:NEDO
国際ロボット展に出展した3台の移動ロボット 出典:NEDOシステムインテグレーターやロボットメーカーは、ソフトウェアを活用することでAMR-IFに準拠した運行管理システムを容易に開発できる。同時に、東芝は利用者からのフィードバックを活用し、インタフェースの充実、改善を図っていく。
東芝は今後、AMR-IFの標準化を図るとともに、RRIの活動などを通じて国際標準化も目指す。
- 耐環境リモートI/Oに−25〜+75℃対応製品追加、デジタル入出力/シリアル
- 産業設備の無線通信を高速化、Wi-Fi6対応アクセスポイント専用機を発売
- 検査装置が「考える」時代へ オムロンがNVIDIAとの協業で広げるAI検査の新技術
- 自動化進展で保全業務の負荷高まるも人員未拡充、実態調査で判明
- AI活用の混載品パレットピッキングシステム構築、大成建設とファナック
- RS-422A、RS-485準拠のCOMポートを増設するシリアル通信モジュール
- 先端半導体用ゲート酸化膜の不純物が大幅減、効率的なOHラジカル生成技術確立
- 設備データと人の暑さストレスデータを一元管理、作業効率化と安全対策強化
- 3次元構造半導体の精密加工に対応、成膜装置と選択エッチング装置を発表
- 横河電機が最新版統合情報サーバを発売、マルチベンダー連携を強化
関連記事
 工場自動化のホワイトスペースを狙え、主戦場は「搬送」と「検査」か
工場自動化のホワイトスペースを狙え、主戦場は「搬送」と「検査」か
労働力不足が加速する中、人手がかかる作業を低減し省力化を目的とした「自動化」への関心が高まっている。製造現場では以前から「自動化」が進んでいるが、2019年は従来の空白地域の自動化が大きく加速する見込みだ。具体的には「搬送」と「検査」の自動化が広がる。 協働ロボット普及のカギは「用途別パッケージ」、2020年は“第3の道”にも期待
協働ロボット普及のカギは「用途別パッケージ」、2020年は“第3の道”にも期待
人口減少が加速する中、製造現場でも人手不足が深刻化している。その中で期待を集めているのがロボットの活用だ。特に協働ロボットの普及により人と同一空間を活用し新たな用途開拓が進んでいる。2020年はこれらの技術進化による普及が本格的に進む一方で、「人」との親和性をさらに高めた“第3の道”の登場に期待が集まっている。 人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか
人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか
人手不足に苦しむ中で、工場でもあらためて自動化領域の拡大への挑戦が進んでいる。その中で導入が拡大しているのがロボットである。AIなどの先進技術と組み合わせ、ロボットを活用した“自律的な全自動化”への取り組みも進むが現実的には難易度が高く、“人とロボットの協調”をどう最適に実現するかへ主流はシフトする。 協働ロボット、ロボットシステムに残された課題と未来
協働ロボット、ロボットシステムに残された課題と未来
協働ロボットを現場で活用するのにどのような工夫が必要か――。ロボット技術の総合展示会「2017国際ロボット展」では、ロボットメーカーおよびユーザー企業によるパネルディスカッション「ロボットフォーラム2017」が実施され、協働ロボットの意義について語った。 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 検査装置が「考える」時代へ オムロンがNVIDIAとの協業で広げるAI検査の新技術
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
- DMG森精機、最大生産拠点の現場デジタル化と工程集約
- フィジカルAI時代における日本のロボットメーカーの取り組み
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 「この部品仕分けして」でロボットが自律的動作、安川電機が生成AIとの連携で
- 動き出したファナックの「フィジカルAI」
- 産業設備の無線通信を高速化、Wi-Fi6対応アクセスポイント専用機を発売
- 自動化進展で保全業務の負荷高まるも人員未拡充、実態調査で判明
- オリエンタルモータが新型サーボモーターと周辺機器でチップ搬送デモ
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。