転倒防止機能を持つロボット歩行車を開発:医療機器ニュース
産業技術総合研究所と幸和製作所は、転倒防止機能を備えるロボット歩行車を共同開発した。転倒動作シミュレーションに基づき設計され、転倒の初動を抑制することで転倒を防止する。
産業技術総合研究所は2019年12月9日、転倒防止機能を備えるロボット歩行車を、幸和製作所と共同開発したと発表した。転倒動作シミュレーションに基づき設計され、転倒の初動を抑制することで転倒を防止する。車いす移動が中心の要介護高齢者の安全な歩行が可能になり、要介護度の重度化予防が期待される。
安定性と操作性の両立、トイレなど狭い空間での利用に対応するため、デジタルヒューマンモデルを活用。歩行車が最も不安定となる状態で車輪が床を離脱するかを評価し、歩行車の重量を設計した。操作性については、足位置を中心に両輪が逆回転することで旋回が可能な構成とし、同時にパワーアシストした両輪でバランスを制御する。
また、利用者が介助なしに車いすでの移動と同等の安全性を確保するため、重心が片寄る初動を制御する機構を開発した。この転倒防止機構は、脇下に接触せずに近接して上体部を囲み、また後方への転倒を防止するため背面を支持して、ふらつく、つまずくなどの抑制に有効に働く。
同機構の有効性を検証するため、人型ダミーを用いた転倒実験を横浜市総合リハビリテーションセンターで実施した。開発した歩行車では、ダミーの重心移動に応じて歩行車も移動したのに対し、通常の歩行車では転倒に至った。さまざまな条件で転倒実験を行った結果、人型ダミーは、開発した歩行車から一度も落下しなかった。
歩行車ごと転倒するリスクについては、後方重心姿勢で転倒させた際に、足先が歩行車の下に潜り込んで歩行車の前面が床から浮く場合があった。そのため、膝をサポートする機構を追加した。
今後は、試作機のJIS T 9265:2012に基づく静的安定性試験、転倒事象再現装置によるけん引試験を行い、市販の歩行車との比較を検証する予定だ。さらに、量産モデルの開発、老人ホームでの実証実験を予定している。結果が良好であれば、2021年2月までの実用化を目指すとしている。
 転倒防止ロボット歩行車試作機 出典:産業技術総合研究所
転倒防止ロボット歩行車試作機 出典:産業技術総合研究所 使用時のイメージ 出典:産業技術総合研究所
使用時のイメージ 出典:産業技術総合研究所 デジタルヒューマンモデル 出典:産業技術総合研究所
デジタルヒューマンモデル 出典:産業技術総合研究所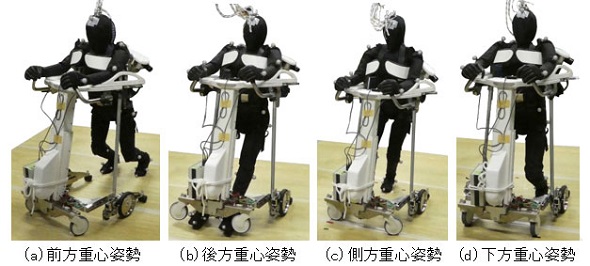 人型ダミーを用いた転倒実験の様子 出典:産業技術総合研究所
人型ダミーを用いた転倒実験の様子 出典:産業技術総合研究所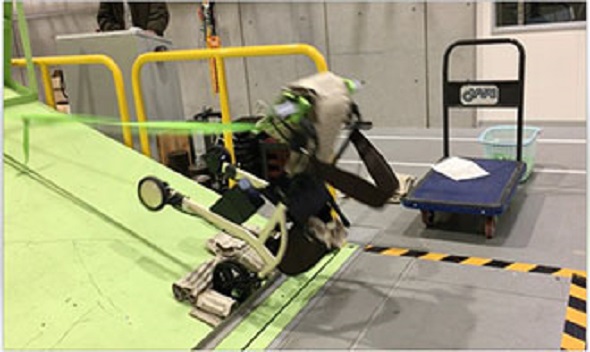 JIS T 9265に基づく静的安定性試験 出典:産業技術総合研究所
JIS T 9265に基づく静的安定性試験 出典:産業技術総合研究所 転倒事象再現装置によるけん引試験 出典:産業技術総合研究所
転倒事象再現装置によるけん引試験 出典:産業技術総合研究所- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- スマホ認証機構と資格確認用PCを内蔵した新型「顔認証付きカードリーダー」を発表
- 日本人の骨格に合わせて設計、上腕骨折用の治療システムを提供開始
- 抗がん剤調製から投与までを安全に、テルモが閉鎖式システムの新製品を発売
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 非接触の3D計測で早期発見、脊柱側弯症の学校検診をデジタル化
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 目が不自由な人の歩行をAIが音声で支援、歩行補助デバイス開発へ
- 病院のセキュリティ対策をWebで可視化、最新ガイドラインにも対応
関連記事
 美しい歩行姿勢へ導く、歩行センシングインソールの先行予約販売を開始
美しい歩行姿勢へ導く、歩行センシングインソールの先行予約販売を開始
FiNC TechnologiesとNECは、クラウドファンディングを利用し、ウェルネスソリューションを共同開発し、歩行センシングインソール、「A-RROWG」の先行予約販売を開始した。 歩行特徴デジタル化技術で、疾病による歩き方の特徴を定量化
歩行特徴デジタル化技術で、疾病による歩き方の特徴を定量化
富士通と富士通研究所は、筋骨格や脳神経、循環器などの疾病の影響で現れる、患者のさまざまな歩き方の特徴を定量化する歩行特徴デジタル化技術「FUJITSU KIDUKU Walking Engine」を開発した。 自立歩行支援を目的とした介護機器の開発に着手
自立歩行支援を目的とした介護機器の開発に着手
ジェイテクトは、自立歩行支援を目的とした介護機器「J-Walker テクテック」の開発に着手した。自立歩行が困難な要介護者の歩行を支援し、自立度を高める歩行器で、2020年度の販売開始を目指す。 歩行訓練機器が米国で医療機器の認証を取得
歩行訓練機器が米国で医療機器の認証を取得
ホンダは、アメリカの食品医薬品局に歩行訓練機器「Honda歩行アシスト」の市販前届け出を行い、その認証を2018年12月に取得した。アメリカにおいて、同機器の技術的な実証実験だけでなく、事業展開が可能になる。 モーター制御で足の動きを補助する足首アシスト装置を発売
モーター制御で足の動きを補助する足首アシスト装置を発売
安川電機は足首アシスト装置「CoCoroe AAD」を発売した。歩行に求められる足首の底屈、背屈の動きをモーター制御で補助することで、長時間、安全な歩行練習を繰り返すことができる。 ホンダの歩行訓練機器が欧州の医療機器認証を取得
ホンダの歩行訓練機器が欧州の医療機器認証を取得
本田技研工業は、歩行訓練機器「Honda 歩行アシスト」が欧州の医療機器指令の認証を取得したと発表した。認証取得によって「CEマーキング」を使用できるようになり、EU域内で事業が展開できる。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 日本人の骨格に合わせて設計、上腕骨折用の治療システムを提供開始
- 気温45℃でも15℃を維持、冷却性能が1.6倍になった水冷ウェアを開発
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。