行け!! マイクロマウス! ステッピングモーターで前進だ:マイクロマウスで始める組み込み開発入門(12)(1/3 ページ)
市販の組み立てキットを利用して、「マイクロマウス」の開発を進める北上くんとえみちゃん。サンプルのソースコードに頼らず、オリジナルプログラムでマイクロマウスを走らせようと奮闘中だ。今回は、いよいよモーター制御に取り掛かる!!
前回までのあらすじ
組み込み技術者に要求される要素が“ギュッ”と詰まった「マイクロマウス」。北上くんと新入社員のえみちゃんは、スキルアップを兼ねてマイクロマウスを開発中です。これまで、えみちゃんは北上くんの指導を受けながら、LEDやブザーの制御、A/D変換、シリアル通信といったマイコン制御の基礎を学んできました(前回の記事へ)。


- 走行中の姿勢制御を実装し、目標走行時間を突破せよ!!
- センサーで壁の有無を判断し、迷路内を自律走行!!
- 台形駆動で脱調を克服! ステッピングモーターをスピードアップ
- 行け!! マイクロマウス! ステッピングモーターで前進だ
- シリアル通信でセンサー値をPCのモニターに出力しよう!
- アナログからデジタルへ、センサーの値をA/D変換して取得しよう!
- マイコンの気持ちを理解してチャタリングを防止!! タイマー割り込みを使いこなそう
- スイッチの仕様を考え、プログラムに落とし込もう!
- 階層構造を意識したLED点灯プログラムに挑戦しよう!
- 階層構造を意識して、信頼性の高いプログラムを組もう!
- 走れ、マイクロマウス!! 迷路攻略、完走する日を夢見て
- 光れ、LED!! それがマイクロマウスの第一歩
- マイクロマウス組み立てキットによる電子工作のイロハ
- 「何これ、超速い!」――キミは知っているか、小さくて賢いロボット「マイクロマウス」を
ステッピングモーターの原理
――ピンポーン!(チャイムの音)
こんにちはー!!
やぁ、えみちゃん。

センパイ、今日は「モーター」を回すんですよね!

うん。マイクロマウスを「前進」「停止」「旋回」させるプログラムを作っていくよ。

やっと、ここまできたーって感じがしますね。
ワタシ、マイクロマウスがちゃんと走るか、今からドキドキしてますよぉ〜。
実際にモーターを制御するプログラムを組んでみると、「階層構造化って便利だな〜」ってあらためて実感できると思うよ!
そうなんですかぁ〜。楽しみです!!
よし! じゃあ、始めようか。
「モーター」といっても、さまざまな種類があります。「ACモーター」「DCモーター」「ギアドモーター」「超音波モーター」「サーボモーター」「ステッピングモーター」など……。サイズも携帯電話機に内蔵されている小さなものから、エレベーターを動かす巨大なものまで大小さまざまです。これだけの種類とサイズがあるのは、モーターが私たちの生活になくてはならないものだからです。ちなみに、高級自動車には100個以上のモーターが搭載されているそうです。目に見えないところで、たくさんのモーターが動いているのですね。
それぞれのモーターには特徴があり、用途に応じて使い分けられています。マイクロマウス競技会でも30年以上ある歴史の中で、使用されるモーターが時代とともに移り変わってきました。
現在は、エンコーダー付きのDCモーターが容易に入手できるようになりましたので、マイクロマウス競技のトップレベルにいる参加者たちは、DCモーターを採用しています。DCモーターには、小型・軽量で起動トルクが大きいという利点があります。しかし、加速にはPWM(Pulse Width Modulation)制御が必須です。また、正確な距離を走らせるにはエンコーダーも必要になるため、初心者が扱うにはハードルが高いかもしれません。
本稿で使用しているマイクロマウスの市販組み立てキット「Pi:Co Classic」に搭載されているのは、ステッピングモーターです。ステッピングモーターは、回転速度と移動距離をプログラムで指示できるので、初心者にも扱いやすいのが利点です。
プログラミングの解説に入る前に、ステッピングモーターの動作原理を簡単に紹介しておきます。
ステッピングモーターは、電源を接続するだけでは回転しません。モーターを駆動させるためには、回転速度や回転角度を決めるパルスを発信し、モーターの巻き線に流す電流を順次切り替える駆動回路が必要です。Pi:Co Classicでは、この駆動回路部分にモータードライバICを使っています。
画像1は、ステッピングモーターの内部構造のイメージ図です。ステータ(固定子)のコイルに電流を流して磁界を発生させ(これを「励磁(れいじ)」という)、永久磁石のロータ(回転子)を回転させます。ステータに電流を流す順番のことを「励磁方式」と呼びます。励磁方式は、1相、2相、1-2相励磁などがあります(表1)。Pi:Co Classicは、回路設計により1-2相励磁に設定されています。


今回は、ステッピングモーターを回して、マイクロマウスを「前進」「停止」「旋回」させるプログラムを作成します。画像1のように、ステッピングモーターは、1ステップごとしか動きません。間断なくパルスを出力しているので、モーターが連続して回っているように見えるわけです。1ステップでどれだけ進むかが確定しているので、迷路の1区画(180mm)を正確に走らせることができます。
パルスはMTUから出力され、出力間隔を短くするとスピードが上がります。パルスを出力した回数をカウントするには、MTUの割り込みを使います。
Pi:Co Classicに搭載されているステッピングモーター(KH39EM-801)のデータシートを読むと、標準仕様のステップ角は1.8度になっています。1-2層励磁で使用しているため、1ステップは0.9度になります。タイヤの直径が48mm、トレッド幅が64mm、迷路1区画の長さは180mmです。これらの物理データから、Pi:Co Classicが迷路内を走行し、旋回するために必要なパラメータが計算で求まります(ソースコード1)。
//Pi:Co Classicの物理的なパラメータ
#define TIRE_DIAMETER 48.0 //タイヤの直径(mm)=48.0mm
#define TIRE_CIRCUIT (PI * TIRE_DIAMETER) //タイヤの円周(mm)≒150.80mm
#define TREAD_WIDTH 64.0 //トレッド幅(mm)=64.0mm
#define TREAD_CIRCUIT (TREAD_WIDTH * PI) //360度旋回時にタイヤが動く距離(mm)≒201.06mm
#define STEP_DEGREE (1.8 / 2.0) //ステッピングモーター(1-2相励磁)のステップ角(度/step)
#define STEP_LENGTH (TIRE_CIRCUIT * STEP_DEGREE / 360.0)
//1ステップで進む距離(mm)≒0.377mm
//迷路のパラメータ
#define BLOCK_LENGTH 180.0 //1区画=180mm
//定数定義
#define PI 3.14159265358979 //円周率π
//モーターMTU発振数
#define MTU_MTR_CLOCK 6000000 //モーター用MTUの発振数
マイクロマウスに搭載されているステッピングモーターの仕組みと、物理パラメータを理解したところで、いつものように、プログラミングに必要な情報をデータシートでチェックしておきましょう(表2、画像2、画像3)。
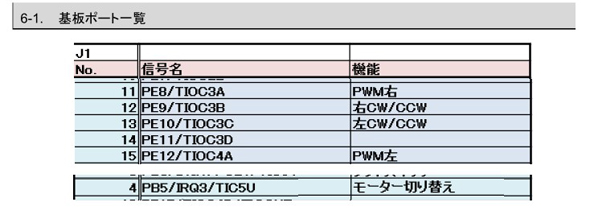 表2 基板ポート一覧(※Pi:Co Classic 取扱説明書_ver1.08.pdfより抜粋)
表2 基板ポート一覧(※Pi:Co Classic 取扱説明書_ver1.08.pdfより抜粋)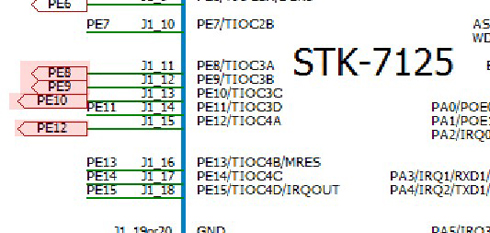 画像2 STK-7125回路図のモータードライバ部分
画像2 STK-7125回路図のモータードライバ部分
PB5に励磁のON/OFFを出力。PE10とPE9にはCW/CCW(モーターの正転/逆転)が、PE12とPE8にはMTUからのパルスが出力されます。
| 参考記事: | |
|---|---|
| ⇒ | ステッピングモーターの仕組みと制御のコツ |
自動車に100個もモーターが入ってるんですねぇ〜。知りませんでしたよ。
えーと、ワイパーとパワーウィンドウと……。う〜ん、100個も思い付かないや(テヘッ)。
……。
ちなみにケータイの場合、どこに使われているか分かる?

ケータイですか!? え〜と……。
ほら、ブルブル震えることがあるでしょ!
あっ、マナーモード!?
そう! あれは、小型の振動モーターを使っているんだ。
シャフトの先端に重心をずらした重りを取り付けて、振動を発生させているんだよ。
へぇ〜、モーターにもいろいろな使い方があるんですね。
うん。普通はモーターの振動を抑える工夫をするんだけど、それを逆手に取ったアイデアといえるね。
面白〜い。組み込みに興味を持つと世の中が変わって見えますね!
そうだね〜。
じゃあ、そろそろステッピングモーターを動かすプログラムを書いてみようか!
はいっ!
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。