「何これ、超速い!」――キミは知っているか、小さくて賢いロボット「マイクロマウス」を:マイクロマウスで始める組み込み開発入門(1)(1/3 ページ)
1980年から30年以上継続されているロボットコンテスト「全日本マイクロマウス大会」をご存じだろうか? 小さくて賢いロボット「マイクロマウス」を題材に、組み込み開発の基本を楽しく身に付けよう!
はじめに
皆さん、「マイクロマウス」をご存じでしょうか? マイクロマウスとは、手のひらサイズの自立型ロボットで、1980年から続いているロボットコンテスト「全日本マイクロマウス大会」の走行体(競技ロボット)として長年親しまれています。実はこのマイクロマウス、組み込み開発の流れを学ぶ上で非常に興味深い題材でもあります。
本連載では、以下の2人と一緒にマイクロマウスを用いて、組み込み開発の基礎を学んでいきます(本連載のゴールについては本稿の最後でご紹介します)。


「自立」と「自律」について
小型自立ロボット「マイクロマウス」とは?
――昼休み、北上くんがPCで何かの動画を見ているようです。

おー、これはすごい! 興奮するなぁ〜。

北上センパイ、何を熱心に見ているんですか? まさか会社で変なものを見ているわけじゃないですよね〜(ジーッ)。

あ、あぁ、これかい。マイクロマウス大会の動画だよ。

何ですかそれは(どれどれ)? ヤバッ、速っ!! 何これ!? 超速いんですけど〜。
新入社員のえみちゃんは、初めて見るマイクロマウスの動きに驚き、思わず学生口調が出てしまいました。さて、読者の皆さんは、マイクロマウスというロボットをご存じでしょうか?
まずは、以下に示した2011年度の優勝マイクロマウスの動画を見て、えみちゃんの“驚き”を共有してみましょう。最初に、マウス自身が未知の迷路を探索しながら走り、その後、割り出した最短ルートをものすごいスピードで疾走しながらゴールを目指します。
もうお分かりだと思いますが、上の動画で動いているロボットが、マイクロマウスです。
さて、このマイクロマウス大会の歴史は古く、1977年にIEEE(米国電気電子学会)が提唱し、スタートしました。日本では、1980年にニューテクノロジー振興財団の主催で「第1回 全日本マイクロマウス大会」が開催され、今年(2012年)で33回目を迎えます。この歴史からも分かる通り、マイクロマウスは、日本の、いや世界の(といっても過言ではないでしょう)ロボットコンテストの草分け的存在なのです。
ちなみに、先の動画で紹介したのは、マイクロマウスクラシック競技の「エキスパートクラス」の優勝ロボットです。このクラシック競技には、他にも初級者向けの「フレッシュマンクラス」があります。
2009年には、クラシック競技の2分の1サイズの迷路を走る「マイクロマウス(ハーフサイズ)」がスタートしました。これは近年、小型の電子部品やセンサー類の個人入手が可能になったことを受けて、コンテストのレベルアップを目指し、従来のロボット規格と迷路を半分にスケールダウンした競技です。
このハーフサイズの登場以降、“マイクロマウス”はハーフサイズマウスに向けられる用語となり、従来のサイズは「マイクロマウスクラシック」と改称されました。本連載においては、自律で迷路を走行するロボットを総称して、“マイクロマウス”と表記することにします。
規定では、マイクロマウスクラシック競技におけるロボットのサイズは、縦・横250mm内と定められています。しかし、これは第1回大会当時の規格であり、現在のマイクロマウスは小型化が進み、“手のひらに乗るサイズ”が主流となっています。
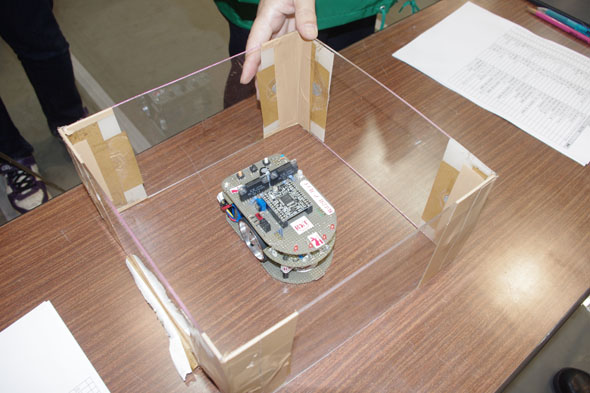 画像1 マイクロマウスクラシック競技に出場するマイクロマウスが車検を受けている様子。小型化が進んでいる。かつては、この枠ギリギリの大きなマイクロマウスが出場していた
画像1 マイクロマウスクラシック競技に出場するマイクロマウスが車検を受けている様子。小型化が進んでいる。かつては、この枠ギリギリの大きなマイクロマウスが出場していたクラシック競技の迷路は、1区画180mmの16×16区画で構成されています。もちろん、事前に迷路の情報は提供されません。まず、マイクロマウスは迷路の左隅にあるスタート地点を出発し、センサーで壁を検知しながら迷路内を走り回り、中央にあるゴールを目指します。そして、ゴールに到達した後も未走破区画を走り、最短経路を探します。
この「探索走行」が終了すると、今度は、スタートからゴールまで最短ルートを駆け抜けます(最短走行)。エキスパートクラスの場合は、持ち時間5分で、探索走行を含めて5回の走行にチャレンジでき、その中で最も短いタイムが成績となります。
ちなみに、ゴールが中央に設置されているため、古典的な迷路攻略法である「左手法(左手を壁に当てて歩いて行けば、いつかは出口にたどり着く)」は、使えません。その上、ゴールへ至る経路は複数あります。
 画像2 「第32回 マイクロマウス大会 2011」。エキスパートクラス決勝で用いられた迷路。あなたは、この中からゴールへ至る経路を幾つ見つけられるだろうか? なお、ゴールへの経路は複数あり、最短経路はマイクロマウスの性能によって変わる(クリックすると経路を表示)
画像2 「第32回 マイクロマウス大会 2011」。エキスパートクラス決勝で用いられた迷路。あなたは、この中からゴールへ至る経路を幾つ見つけられるだろうか? なお、ゴールへの経路は複数あり、最短経路はマイクロマウスの性能によって変わる(クリックすると経路を表示)Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。