リタイア続出! “魔の第1コーナー”で一体何が? 〜 ETロボコン2012チャンピオンシップ大会〜:ETロボコン・リポート(2/3 ページ)
唯一の完全制覇チームは「猪名寺駅前徒歩1分」
後半のボーナス・ステージは、イン側とアウト側でコースが分かれる。
イン側の難所は「ルックアップゲート」「ドリフトターン」、アウト側は「階段」「シーソー」で、どちらも最後に「ガレージイン」に成功することで完走となる。さらに、Bluetooth通信を用いた「リモート・スタート」に成功することで得られるボーナスもあり、イン側・アウト側とも、最大40秒を走行タイムから引くことが可能となる。
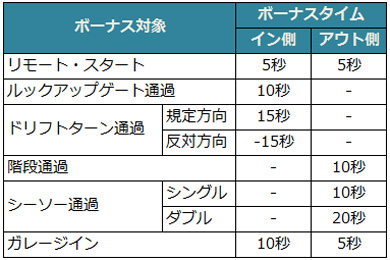 表1 ボーナスタイムの一覧表。走行タイム以上のボーナスタイムを稼ぐことができれば、結果タイムはマイナスになる
表1 ボーナスタイムの一覧表。走行タイム以上のボーナスタイムを稼ぐことができれば、結果タイムはマイナスになるボーナス・ステージまで完走できたのは、1回目・2回目ともにわずか4台ずつ。それら4台の中で、アウト側を完走できたのはそれぞれ1台だけだった。結果だけ見ると、特にアウト側の難易度が高かったといえるかもしれない。





2回とも完走を果たし、競技部門での1位となったのが「猪名寺駅前徒歩1分」(三菱電機マイコン機器ソフトウエア)。走行タイム自体は26秒前後と手堅いペースであったが、2回とも40秒のボーナスを得たことが大きかった。イン側とアウト側のボーナス・ステージを全て制覇できたのは、今大会中、このチームだけ!
同チームは、光センサーの計測値を「まいまい式」と呼ばれるフィルタで補正。内蔵LEDを点滅させ、ON時とOFF時の計測値の差分を取ることで、外乱光の影響を軽減させていた。もしもコース上に局所的に外乱光が変化する場所があっても、この方法ならば問題なく対応できるし、会場での調整も大幅に楽になるだろう。

多くのチームが失敗していた階段での戦略もユニークだった。階段では、勢いを付けてから上ろうとすると、真っすぐ進入できなかった場合に転落しやすい。そこで、同チームは片輪ずつ上る方法を採用。長い助走距離を不要にし、ラインから逸脱する危険性が低くなっており、階段を確実にクリアしていた。
リモートブレイン導入の「HELIOS」
前述の通り、ロボット自体はバランスをとった2輪での走行が可能なのだが、ベーシック・ステージにおいては、実は2輪で走行しているロボットはほとんどいない。今大会の主流は、本来、完全自律停止のために追加された“尻尾”を降ろしたまま走るという「尻尾走行」。3点接地のため安定しており、倒立振子に比べて、高速な走行が実現できる。
ただし、同じ尻尾走行を採用しているロボットであっても、チームごとに走行スピードはバラバラ。バッテリーやモーターは全く同じであるため、機械的な最高速度は同じはず。しかし、ライントレースは速く走るほど難しくなるので、これ以上スピードを出したら失敗する、という制御上の限度が出てくる。これが走行速度の差となって現れるのだ。
最高速度は同じなので、どれだけ減速せずにライントレースできるか――。これが走行タイムを縮めるためのカギとなる。総合優勝を果たした「HELIOS」(アドヴィックス)が目指したのは、その最高速度での走行だ。同チームによれば、モーター出力最大時の速度は秒速687mm程度で、この速度のまま走った場合、走行タイムは21.5秒前後になるという。
ただし、直線とカーブで同じPIDパラメータだと、高速に走行するのが困難になる。この対策としては、場所に応じてPIDパラメータを切り替える方法が一般的だが、会場での調整に時間がかかる。そこで同チームは、PIDパラメータを直線にあわせ、それぞれのカーブに適した旋回量を加えるという方法を採用。試走での調整を容易にした。

走行タイムは、1回目が21.7秒(イン側)、2回目が21.9秒(アウト側)と、今大会ではダントツの速さ。残念ながら2走目のボーナス・ステージで失敗したため、競技部門としての順位は5位にとどまったものの、純粋に走行タイムだけを見れば堂々の1位。これだけのスピードを出しながら、カーブでの安定感も抜群だったのは特筆に値するだろう。
もう1つ注目したいのは、PCによる支援を積極的に取り入れたこと。前大会から、BluetoothによるPCとの通信が許可されているのだが、ほとんどのチームは、スタート命令の送信にしか使っていない。ところが、HELIOSはPC側にマップ情報を持たせ、自己位置の推定や、コースアウト時のライン復帰の計算などを、PC側に処理させた。

MINDSTORMS NXTはPCに比べると計算速度が遅く、メモリ容量も小さい。リアルタイム性が必要なため、あまり複雑な処理はできないが、PCであれば、はるかに高度な処理が可能になる。開発が大規模になって大変そうだが、今後採用チームが増える可能性もあり、しばらく注目したい技術だ。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。