痛みに顔をゆがめ・嘔吐する――歯科臨床実習用ロボット「SIMROID」の開発に成功:その表情リアル過ぎ!
科学技術振興機構は「ヒト型患者ロボットを含む歯科用臨床実習教育シミュレーションシステム」の開発結果を「成功」と認定した。患者ロボット(SIMROID)は、眼球や口、首などを動かし、歯の治療に伴う痛みや不快な表情を再現できる。
科学技術振興機構(JST)は2012年5月24日、独創的シーズ展開事業「委託開発」の開発課題「ヒト型患者ロボットを含む歯科用臨床実習教育シミュレーションシステム」の開発結果を「成功」と認定した。
同開発課題は、日本歯科大学附属病院 羽村章病院長らの研究成果をベースに、2009年1月から2012年1月にかけてモリタ製作所に委託し、開発が進められてきた(開発費2.3億円)。
従来行われている人工模型の歯を設置したマネキン(“ファントム”という)による実習(注射や歯を削る実習など)では、患者と対話しながらの治療ができないのはもちろんのこと、表情の変化や動作などを確認することもできない。そのため、教育現場では、患者の負担(痛みや出血といった肉体に刺激を伴うような負担)を考慮することができるリアルで、インタラクティブな実習環境が望まれていた。
今回開発に成功したシミュレーションシステムは、表情・動作・会話が可能で、外観も人に非常によく似た「患者ロボット(SIMROID)」を用いたトレーニングシステムである。実際の人による診療に限りなく近づき、臨場感を伴った実習が可能になるという。また、2台のカメラで実習の様子を撮影し、治療内容や術者の診療態度について客観的に評価することもできる。
 図1 システム構成
図1 システム構成同シミュレーションシステムは、患者ロボット、専用ソフトウェアをインストールしたPC(ロボットの操作・制御の他、実習の記録・再生などを行う)、歯科用ユニット(実際の治療器具を配置)、CCDカメラ、マイクなどから構成される(図1)。患者ロボットは、エアシリンダにより、眼球(上下左右)・まつげ・口・首(前後左右)・左手といった部位を動かすことが可能。これらの動きを組み合わせることで、痛みや不快な表情、嘔吐(おうと)反射などを再現できる(図2、3)。
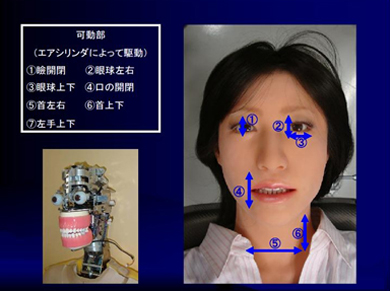 図2 患者ロボットの駆動可能部位
図2 患者ロボットの駆動可能部位 図3 嘔吐している表情
図3 嘔吐している表情患者ロボットの操作および実習の記録・再生などを行える専用ソフトウェアには次のような機能が備わっている(図4、5)。
- 臨床シナリオの作成・編集機能(臨床シナリオの種類は任意に追加可能)
- 臨床シナリオに適した動作・発話用ボタンのレイアウト機能
- 2台のカメラを用い、臨床実習の様子を動画で記録することが可能
- 再生機能および評価コメントの追加が可能
- 2つの実習データを同時に比較・検討することが可能(時系列での比較、指導医によるお手本との比較、異なる実習者間での比較が可能)
- 多言語版対応機能(現状では、日本語・英語に対応)


ロボット/ロボット開発 コーナー

関連記事
- >>「ロボット」特集
 ケンケン、手酌、聖徳太子!? ――自律性と状況適応能力が向上、新型ASIMO誕生
ケンケン、手酌、聖徳太子!? ――自律性と状況適応能力が向上、新型ASIMO誕生
ホンダは、知的能力・身体能力・作業機能を向上させたヒューマノイドロボット「新型ASIMO」を発表した。従来の「自動機械」から「自律機械」へと進化を遂げたという。 走行・音声認識を強化、日立の人間共生ロボット
走行・音声認識を強化、日立の人間共生ロボット
日立製作所は人間共生ロボット「EMIEW2」の実用性向上を目的に、走行機能の強化と雑音の中でも声を認識できる音声認識機能を開発した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。