昆虫の行動原理を応用、片方のセンサーが故障しても匂い探索できるロボット:ロボット開発ニュース
国立情報学研究所らは、カイコガの行動原理を応用し、2つあるセンサーの片側が故障しても精度を維持して匂いを探索できるロボットを開発した。長期自律探索機能を持つ災害救助ロボットなどへの応用が期待される。
国立情報学研究所(NII)らの研究グループは2026年3月10日、昆虫の行動原理を応用し、2つあるセンサーの片側が故障しても精度を落とさずに匂いの源を探索できるロボットを開発したと発表した。
同ロボットは、モデル生物であるカイコガの雄が性フェロモンを追跡する際の行動を分析して開発された。カイコガは片側の触角を失った状態でも、残された触角で匂いの情報を獲得し、信号の位置や自身の身体の向きの情報と統合することで、行動決定プロセスを変化させている。研究グループはこの知見を基に、片側のセンサー情報が欠損した場合も頑健性を保つ「生物規範型ロボティクス」を構築した。
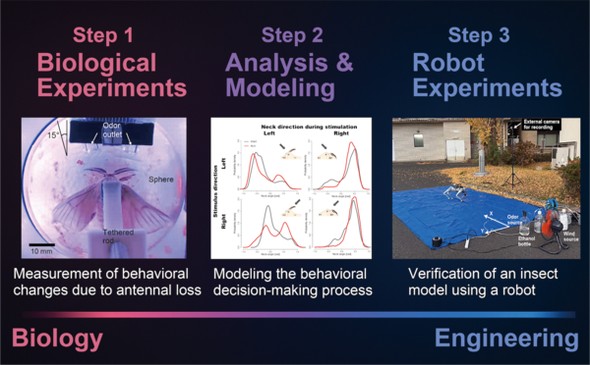 生物実験による機能解明と工学的な再構成によって解き明かす、昆虫の適応的な匂い源探索能力 出所:国立情報学研究所
生物実験による機能解明と工学的な再構成によって解き明かす、昆虫の適応的な匂い源探索能力 出所:国立情報学研究所室内および外乱の多い野外環境で同ロボットの実証実験を実施したところ、片側のセンサーが故障しても、探索性能が故障前と同等であることを確認できた。従来の匂い誘導型ロボットでは感覚器官の損傷が性能低下に直結していたが、昆虫を規範とする今回の適応戦略により、探索において高い成功率と効率を維持できることが分かった。
開発した技術は、災害救助や爆発物の探査、環境モニタリングなど、過酷な環境下で長期間の自律探索が求められるロボットシステムへの応用が期待されている。研究グループは、生物の巧みな行動戦略を工学的に応用することで、実用的なロボットの設計指針に貢献するとしている。
関連記事
 700Gbps超/590nsのデータ圧縮通信技術、FPGAクラスタの通信ボトルネックを解消
700Gbps超/590nsのデータ圧縮通信技術、FPGAクラスタの通信ボトルネックを解消
国立情報学研究所らは、FPGAクラスタの通信性能を大幅に向上させる超低遅延、高帯域圧縮通信技術を開発した。圧縮、復号処理を含めた通信遅延を590nsに抑えつつ、最大757Gbpsの実効通信帯域を達成した。 「賢い個」より「単純な集団」、外部記憶を活用する集団知能を理論化
「賢い個」より「単純な集団」、外部記憶を活用する集団知能を理論化
東京大学は、環境を「外部記憶」として活用する分散的な集団知能を、最適化の観点から捉える新理論を構築した。単純な知能しか持たない個体群でも、分散処理で高知能な単独個体の知性を超えることを示した。 ウツボカズラから着想、花王が鳥の糞も滑り落ちる水性コーティング剤を開発
ウツボカズラから着想、花王が鳥の糞も滑り落ちる水性コーティング剤を開発
花王は、同社の研究開発拠点であるテクノケミカル研究所において、塗布するだけで物が滑り落ちる表面を作り出し、汚れなどの付着を抑制する水性のコーティング剤技術を開発したことを発表した。 ハエの脚裏を模倣して接着と分離を繰り返せる構造を開発、作り方もハエに学ぶ
ハエの脚裏を模倣して接着と分離を繰り返せる構造を開発、作り方もハエに学ぶ
NIMS(物質・材料研究機構)は、北海道教育大学、浜松医科大学と共同で、ハエを参考に「接着と分離を繰り返せる接着構造」を単純かつ低コストで製作できる新しい製造プロセスの開発に成功した。バイオミメティクス(生物模倣技術)を基に、接着構造だけでなく、作り方もハエの「生きたサナギの中での成長」を模倣することで実現した。 11年かけて完成させたカブトムシ型“超”巨大ロボットが熱い!
11年かけて完成させたカブトムシ型“超”巨大ロボットが熱い!
本業をこなしながら約11年の歳月をかけ、たった1人で完成させたのは、何と超巨大な“カブトムシ型ロボット”だった。その名も「カブトム RX-03(KABUTOM RX-03)」! 見積もり値の「幼虫」「サナギ」「成虫」
見積もり値の「幼虫」「サナギ」「成虫」
「ソフトウェア技術者の最高の能力は、見積もりだ!」――“見積もり”をテーマにした新シリーズ「見積もり:ソフトウェア技術者の最高の能力」の第3回。今回は、見積もり値の“3つの状態”について解説する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。