ウエハー破損リスクを低減する自動搬送システム、ディスコが後工程にも提案:SEMICON Japan
ディスコは、「SEMICON Japan 2019」に出展し、加工プロセスに応じて複数の半導体製造装置を連結できるクラスターシステム「MUSUBI」や屋上搬送システム「RoofWay」など、効率的なウエハー搬送ソリューションを提案した。
ディスコは、「SEMICON Japan 2019」(2019年12月11〜13日、東京ビッグサイト)に出展し、加工プロセスに応じて複数の半導体製造装置を連結できるクラスターシステム「MUSUBI」や屋上搬送システム「RoofWay」など、効率的なウエハー搬送ソリューションを提案した。

従来の半導体製造プロセスはウエハー裏面研削後にダイシングを行うが、積層数の増加が進む3D NANDフラッシュなどウエハー薄化が求められる領域では、薄いウエハーを搬送する時の破損リスクやチップ裏面に発生するチッピングが課題となっていた。そこで、先にウエハーをハーフカットした後、裏面を研削することでチップに分割するDBG(Dicing Before Grinding)といったプロセスがディスコなどから考案され、ウエハー搬送による破損やチッピングといったリスクが低減されている。
MUSUBIはDBGやSDBG(Stealth Dicing Before Grinding)プロセスに対応する、新しい搬送方式を採用したクラスターシステムだ。300mmウエハーを取り扱うことができ、メモリやロジック、パワーなど広範なアプリケーションに活用可能とする。MUSUBIでは、ウエハーが1枚ずつ装置間を移動し加工終了後にカセットに収納される。加工後ウエハーが収納されたカセットを次の装置へ人力で搬送する必要がないため、ウエハー破損リスクが大幅に低減できる。
同社ブースでは、MUSUBI対応機器であるグラインダーポリッシャー「MGP8762」、ドライエッチャー「MFE8061」、マルチファンクションウエハーマウンター「MFM9200」が連結されていた。各装置へのウエハー投入と取り出しは、搬送ハンドロボットが装置間に渡されたレーンを走行しながら行う。
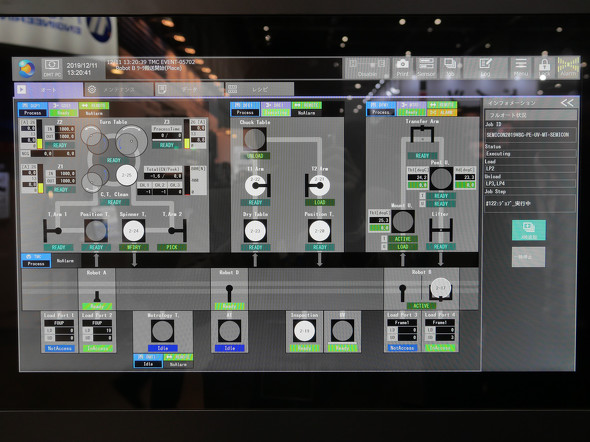 MUSUBIには稼働状況が確認できるHMIが搭載されている
MUSUBIには稼働状況が確認できるHMIが搭載されているMUSUBIでは各装置の加工時間に応じて適切な台数の搬送ハンドロボットを追加することで、搬送によるウエハー滞留を抑制できることがメリットだ。また、搬送ハンドロボットも、薄化後のウエハーを搬送する全面吸着パッドとダイシングフレーム貼り付け後のウエハーを搬送する機構が一体となった「ダブルハンドロボット」とし、多様なプロセスに対応可能とした。
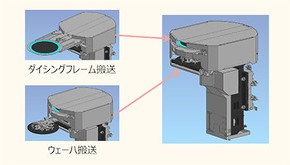 ダブルハンドロボットの詳細 出典:ディスコ
ダブルハンドロボットの詳細 出典:ディスコ ダブルハンドロボットがウエハーを搬送する様子
ダブルハンドロボットがウエハーを搬送する様子MUSUBIシステムおよび、同システム対応機器であるMGP8762、MFM9200は既に販売している。MFE8061は2020年8月から発売される見込みだ。今後発表予定のレーザー加工機「MFL7362」やCMPポリッシャー「DFP8170」もMUSUBIに対応する。また、後付けによる構成変更も可能とし、システム対応機器であれば他社製プロセスモジュールとも接続できるという。
また、同じく同社ブースで展示されていたRoofWayもウエハーを自動搬送するシステムとなる。ウエハー搬送を装置上部のレーンを走る独自開発のAGV(無人搬送車)で行う。ベルトコンベヤーなど他の搬送方法と比較して、フットプリントの増加や搬送量増減の追従不足といった課題を解決できるという。

ディスコは以前からAGVを装置上で走らせウエハーを搬送する「並列加工搬送システム」を提案している。この並列加工搬送システムとRoofwayの違いは、システム全体の高さを抑え、軽量化を施した点にあるという。
ウエハーをAGVに積載する方法も変更した。並列加工搬送システムでは、ウエハーを保存するエレベーターユニットにウエハー昇降機能を持たせることでウエハーをAGVに供給していたが、RoofwayではAGV側にウエハー昇降機構を設けた。これにより、既存機器に昇降機能を取り付ける改造なども最小限に抑えられるという。
関連記事
 ソフト人材を求める製造業、競技プログラミングに熱視線
ソフト人材を求める製造業、競技プログラミングに熱視線
ソフトウェア人材の獲得競争が激化している。特に新卒人材の獲得は企業の将来競争力に直結することもあり、各社は工夫をこらした取り組みを進める。その中でも、競技プログラミングに活路を見出す製造業企業が増えている。 ナノスケールのちりの影響を抑制、半導体製造装置が目指すIoT活用
ナノスケールのちりの影響を抑制、半導体製造装置が目指すIoT活用
「SEMICON Japan 2016」のIoTイノベーションフォーラムで登壇した東京エレクトロン執行役員の西垣寿彦氏は、半導体製造における“ちり”の管理と、IoTを使った生産性向上の取り組みについて紹介した。 プラズマダイシング工程におけるレジスト塗布ソリューションを提供
プラズマダイシング工程におけるレジスト塗布ソリューションを提供
EV Groupとパナソニック スマートファクトリーソリューションズは、プラズマダイシング工程におけるレジスト塗布ソリューションの提供を開始した。 SiC需要拡大に対応しイタリア企業が日本市場に参入、エピ成膜装置を展開
SiC需要拡大に対応しイタリア企業が日本市場に参入、エピ成膜装置を展開
イタリアの半導体製造装置メーカーであるLPE(エルピーイー)は2019年10月2日、日本市場に本格参入し新たに巴工業と代理店契約を行った他、エピ成膜装置の自動搬送型新製品「PE106A」を日本で販売開始すると発表した。 半導体後工程のターンキープロバイダーへ、ヤマ発が新川とアピックヤマダを買収
半導体後工程のターンキープロバイダーへ、ヤマ発が新川とアピックヤマダを買収
ヤマハ発動機、新川、アピックヤマダの3社は2019年2月12日、東京都内で会見を開き、同日に発表した事業統合について説明。「日本のモノづくり力を結集した半導体後工程のトータルソリューションを提供する」(ヤマハ発動機)という。 TSMCは2020年に5nmプロセスを量産、自動車向けロードマップも示す
TSMCは2020年に5nmプロセスを量産、自動車向けロードマップも示す
TSMCは2019年6月28日、横浜市内で記者会見を開催し、同社半導体ファウンドリビジネスの概況やプロセス技術開発への取り組みなどを説明した。世界最大の専業ファウンドリである同社の収益は既に7nmプロセス(N7)がけん引役となっており、2020年から5nmプロセス(N5)を採用したチップの量産開始を予定する。
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- なぜ熊本に半導体産業が集まるのか――地震で工場稼働停止相次ぐ
- 医療機器部品の生産拠点へ、オリンパス長野事業場で最新設備に機能集約
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。