「Kinect for Windows」を3Dスキャナとして活用する:Kinectで3Dスキャンして3Dプリントを楽しもう(1)(3/4 ページ)
Kinectによる3Dスキャンから3Dプリントまでの流れ
ここから、Kinectで物体をスキャンして3Dデータを作成し、3Dプリンタで出力するまでの流れを簡単に紹介します。なお、次回以降で詳しい解説を行いますので、ここでは全体の流れだけをつかんでいただければ問題ありません。
まず、Kinectとスキャン対象となる物体(人形)を図8のように配置します。人形は回転台の上に置き、手で台を回転させながら3Dスキャンしていきます。
 図8 「Kinect」とスキャン対象の配置
図8 「Kinect」とスキャン対象の配置Kinect Fusionによるスキャンは、対象物を固定してKinectを移動するやり方が推奨されていますが、狭い場所でもスキャンできるよう回転台を使ってスキャン対象を回転させるようにしています。
3Dスキャン後のデータに修正処理を加えて3Dプリンタで出力したものが図9になります。
 図9 出力結果
図9 出力結果いかがでしょうか? そっくりそのままとはいきませんが、元の人形のシルエットを捉えて出力されていますよね。
Kinect Fusionを用いた3Dスキャンは、測定可能な範囲だけを3Dモデル化するものなので、距離情報を取得できなかった部分(今回の場合、頭のてっぺんや、台の部分など)については、“穴”が開いています。
このままの状態だと正しく3Dプリントできないので、穴を埋める修正作業を行う必要があります。この修正には、マイクロソフトがWindowsストアで公開している「3D Builder」(※)という無償アプリケーションを使用します。
※:Windows 8.1でリンクをクリックするとWindowsストアが開きます。
3D Builderを使った穴埋め
3D Builderを使った穴埋めの手順を簡単に解説します。まず、3D Builderにスキャンしたファイルを読み込ませます。次に、物体の単位を選択します。本来はモデルに適した単位を選択するのですが、調整が煩雑になるため今回は「フィート」のままにしています。
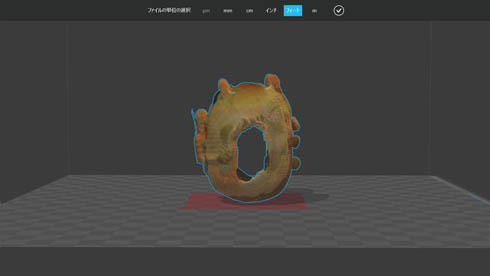 図10 3D Builderを使った穴埋めの手順(1)
図10 3D Builderを使った穴埋めの手順(1)すると、3D Builderの画面上部に警告が表示されるのでこれをクリックして、穴埋め作業を開始します。
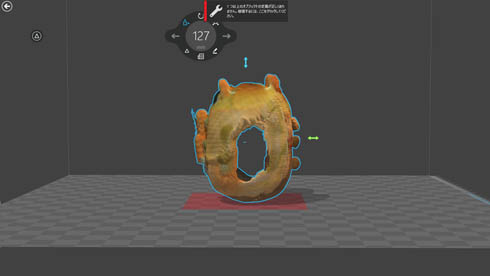 図11 3D Builderを使った穴埋めの手順(2)
図11 3D Builderを使った穴埋めの手順(2)詳しい操作方法などは次回以降で解説しますが、このような感じで穴埋めを施します。今回は、少しくぼんだような形状になりましたが、よりキレイに出力したければ3Dモデリングツールなどで手直しするとよいでしょう。
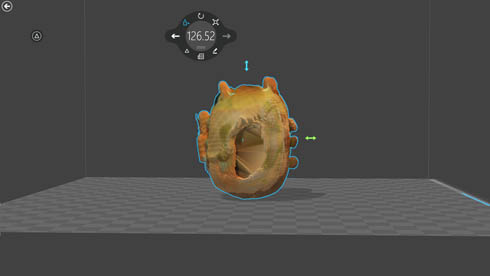 図12 3D Builderを使った穴埋めの手順(3)
図12 3D Builderを使った穴埋めの手順(3)以上、3Dスキャンから3Dプリント出力までの流れをまとめると、図13のようになります。3Dスキャン後、3D Builderで穴埋め処理を行い、3DモデルをSTL形式の3Dデータファイルとして保存。XYZwareで3W形式に変換してから3Dプリントを行います。

その他のデバイスを用いた3Dスキャン例
本連載では、入手性の観点からKinectを使った3Dスキャンの方法をメインに解説していますが、最後に他のモーションセンサーデバイスを用いたスキャン方法も紹介しておきます。
1つは、インテルが推し進めている「インテル RealSense テクノロジー」を用いる方法。もう1つは、Appleの「iPad」に装着して利用できる「Structure Sensor」を用いるやり方です。現状、この2つのモーションセンサーデバイスはKinectよりも所有者が少なく、入手方法もKinectより困難ですが、3Dスキャンに関して言えば、Kinectで行うよりも簡単に行えます。
図14は、インテル RealSense テクノロジーでスキャンした3Dモデルと、その出力物です(人形です)。


そして、図15は、Structure Sensorでスキャンした3Dモデルと、その出力物です(筆者の娘です)。


Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 幾何公差の基準「データム」を理解しよう
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。