大型トラックが時速80km/車間距離4mで自動隊列走行、燃費向上効果は15%以上:いすゞ、日野、ふそう、UDがそろい踏み
新エネルギー・産業技術総合開発機構(NEDO)は、複数台の大型トラックを時速80km/車間距離4mで自動運転・隊列走行させて、燃費を15%以上向上できる技術を開発した。いすゞ自動車、日野自動車、三菱ふそうトラック・バス、UDトラックスの大型トラックをベースに製作した実験車両による実証実験にも成功している。
新エネルギー・産業技術総合開発機構(NEDO)は2013年2月25日、複数台の大型トラックを時速80km/車間距離4mで自動運転・隊列走行させることにより、安全性と燃費を向上できる技術の開発成果を発表した。同技術を用いれば、後続の車両にかかる空気抵抗が減るなどして、燃費を15%以上向上できる効果が得られるという。さらに、いすゞ自動車、日野自動車、三菱ふそうトラック・バス、UDトラックスの大型トラックをベースに製作した実験車両による実証実験にも成功した。
 4台の大型トラックを用いた自動運転・隊列走行の実験風景 出典:NEDO
4台の大型トラックを用いた自動運転・隊列走行の実験風景 出典:NEDO大型トラックの自動運転・隊列走行技術は、NEDOが2008〜2012年度の5カ年で進めている自動車交通分野の省エネルギー対策を追求した「エネルギーITS推進プロジェクト」の基で開発されてきた。2010年9月には、大型トラックを3台使って、時速80km/車間距離15mで自動運転・隊列走行できるという成果を発表しているが、開発の最終段階を迎えた今回は、さらに技術を高度化して車間距離を従来比で約4分の1となる4mまで縮めた。
自動運転・隊列走行に必要な要素技術は5つある。1つ目は、各車両の位置を認識して隊列を形成し管理する「隊列形成」である。2つ目は、道路端の白線を認識して車両の操舵を制御する「車線保持制御」。3つ目は、車車間通信と車間距離検出を用いて車間距離を制御する「車間距離維持制御」だ。4つ目になるのが、障害物を検出し、車線変更や非常ブレーキ制御を行う「障害物との衝突回避制御」である。最後の5つ目は、道路の分合流部や、降雪や悪天候などによって白線認識を行えない時に先行車を認識して追従走行する「先頭車追尾制御」だ。今回の発表では、大型車と小型車が混在する状況でも、これら5つの要素技術を用いることで、自動運転・隊列走行の実験に成功したとしている。
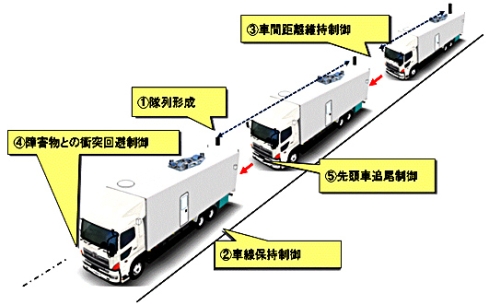 自動運転・隊列走行に必要な5つの要素技術 出典:NEDO
自動運転・隊列走行に必要な5つの要素技術 出典:NEDOさらに、開発した要素技術の汎用性を向上させ、隊列走行の早期実用化にもつなげるため、国内商用車メーカー4社が市販している大型トラックをベースに、車車間通信を用いた車間距離制御技術と前方障害物認識技術を搭載した実験車両を4台製作した。使用した大型トラックは、いすゞ自動車の「ギガ」、日野自動車の「プロフィア」、三菱ふそうトラック・バスの「スーパーグレート」、UDトラックスの「クオン」である。
 実験車両のベースになった国内商用車メーカー4社の大型トラック 出典:NEDO
実験車両のベースになった国内商用車メーカー4社の大型トラック 出典:NEDO関連記事
 三菱ふそうの次世代トラックがスゴイ、2032年は東京-イスタンブール間が直結
三菱ふそうの次世代トラックがスゴイ、2032年は東京-イスタンブール間が直結
三菱ふそうトラック・バスが、20年後の商用車市場を視野に入れた次世代トラックのコンセプトモデルを発表した。2032年の完成を想定する、東京とイスタンブールを結ぶアジアンハイウェイ「AH1」の走行をイメージしたデザインスタディである。 日産自動車のEVトラックはひと味違う、電池を冷凍用に使う車両も
日産自動車のEVトラックはひと味違う、電池を冷凍用に使う車両も
日産自動車は、乗用車「リーフ」とは違ったEV技術の使い方を見せた。冷凍車が内蔵する冷凍機のコンプレッサをリチウムイオン二次電池で動かす、大容量二次電池を搭載して電源車として機能するなどの使い方だ。 EVの本命は軽トラ!? 140万円で購入可能な「MINICAB-MiEV TRUCK」が発売
EVの本命は軽トラ!? 140万円で購入可能な「MINICAB-MiEV TRUCK」が発売
三菱自動車は、軽トラックの電気自動車(EV)「MINICAB-MiEV TRUCK」を2013年1月17日に発売する。「クリーンエネルギー自動車等導入促進対策費補助金」を含めた実質的な価格は139万8000円である。
Copyright © ITmedia, Inc. All Rights Reserved.
モビリティの記事ランキング
- BYDの軽EV「ラッコ」は世界初の軽SDV、新開発の「X-PACK」に電動システムを統合
- 日産が新型「エルグランド」を発売、「AUTECH」は8月上旬に市場投入へ
- 音響通信と自動着水で目指す「海空無人探査ソリューション」とは何か
- 中国の自動車メーカーとテスラに競争力があるのは「合理性が高い」から
- テラチャージやFLASH、テスラなど 熊本地震によるEV充電器の無償開放拠点まとめ
- 矢崎総業がイノベーション拠点を公開、労働集約型モノづくりのスマート化に向け
- 芝浦工業大学、「曲がりたい」と「転びそう」を判別する二輪車制御技術を開発
- ローカル5Gを活用した自動運転実証試験を宮古島で実施
- 自動運転スタートアップのティアフォーが上場、車載半導体のオープン化も視野に
- トヨタホンダ日産が中国で2桁%減、2026年5月の日系自動車生産はスズキの1人勝ち
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。