ボード線図を使って過渡応答と周波数応答を求める:無償ソフトで技術計算しよう【制御工学応用編】(1)(2/3 ページ)
【制御工学応用編】では、制御系の応答性や安定性を評価する方法とPIDコントローラーの設計について説明する。今回は、過渡応答と周波数応答について取り上げる。
インパルス応答
インパルス応答とは、時間幅が無限小で高さが無限大のパルスを入力したときのシステムの出力です。
ある入力に対する応答は、(ラプラス変換後の)入力×伝達関数になります。ここで、インパルス信号、すなわちデルタ関数のラプラス変換は1であるため、伝達関数そのものがインパルス応答となります。インパルス応答を時間波形として求めるには、伝達関数にラプラス逆変換を施して、原関数を求めます。では、(1)式のラプラス逆変換を求めてみます。
【制御工学基礎編】(2)でも説明したように、(1)式右辺は下記のように書き換えることが可能です。
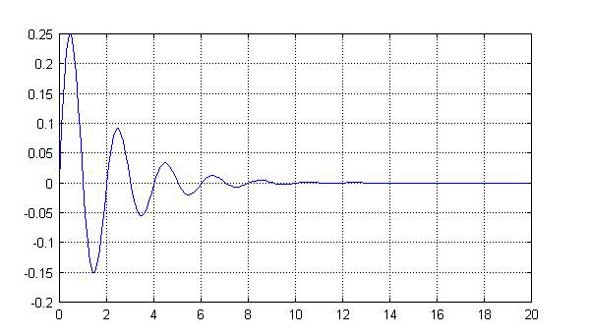
FreeMatは任意の次数の方程式を解くコマンドrootsを持っているので、これを用いて、インパルス応答の時間波形を求めるのが、ex507.mで、動作させると、図3に示すインパルス応答波形が得られます。
clear;m=1;c=1;k=10;
x=roots([m,c,k]);
t=0:0.1:20;
y=1/(x(1)-x(2))*(exp(x(1)*t)-exp(x(2)*t));
plot(t,y);grid('on');
インパルス応答波形を、伝達関数を微分方程式にして数値的に解くことで求めてみます。ただし、インパルス信号は、幅が無限小、高さが無限大の信号であり、数値的に実現するのは難しいため、代わりに、適当な初期値を与えて解いてみます。
まず、出力をYとすると、インパルス応答であるため、伝達関数が出力Yとなることから、(1)式を下記のようにします。
入力が0で初期値が0ではないとして、同様に、(1)式を下記のようにします。
ここで、(3)式と(4)式とが等しいならば、
が成り立ちます。
従って初期値は、
となり、入力を0として、変位の初期値が0、速度の初期値が1/mの微分方程式を数値的に解いたものがインパルス応答波形となります。
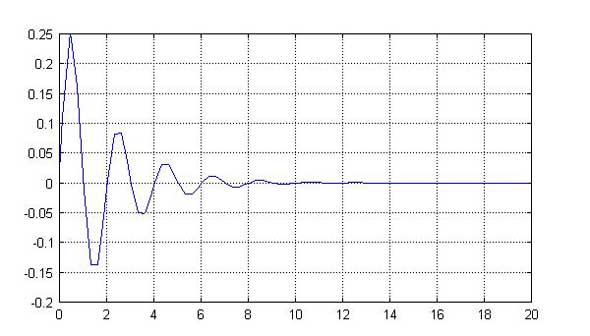
以上からインパルス応答を数値解法により求めるのが、ex508.mで、動作させると、図4に示す波形が得られます。
clear;m=1;c=1;k=10;
dydt=@(t,y) [y(2);(-c*y(2)-k*y(1))/m];
[t,y]=ode45(dydt,[0,20],[0;1/m]);
plot(t,y(:,1));grid('on');
伝達関数を微分方程式に変換する方法、微分方程式をFreeMatで数値的に解く方法については【制御工学基礎編】(3)を参照してください。
Copyright © ITmedia, Inc. All Rights Reserved.