機構制御系のモデリング(その3) 〜回転2関節機構の運動学・動力学を考える〜:1Dモデリングの勘所(38)(3/5 ページ)
動力学(運動方程式の導出)
図8に示す回転2関節機構の動力学について考える。

動力学の場合、運動学に加えて、運動体の慣性力を考慮する必要がある。そこで、各リンクの質量、回転慣性を考慮して運動方程式を導出する。運動方程式の導出は「ラグランジュの方程式」を用いると便利である。ラグランジュの方程式については次回説明する。ここでは、最終的に導出された運動方程式を以下に記す。
 式5
式5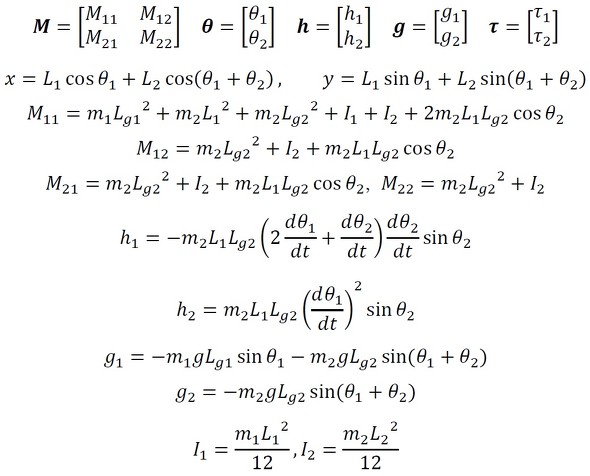 式6
式6上式でLgはリンクの重心位置である。
上式について、2つのリンクは同じ長さL、質量m、回転慣性Iであるとすると、以下の式のように簡略化できる(式7)。以降の解析ではこの式を用いる。
 式7
式7動力学(順問題)
回転2関節機構の運動方程式を用いて、順運動学をModelicaで解くことにする。ここでは、各関節の角変位(θ1,θ2)を一定の角度で動かしたときの、機構先端の動きと各関節に与える必要トルクを求める。各関節は1秒間で1回転するものとする。また、リンクの長さはL=2、質量はm=1とする。以上をModelicaで表記すると以下となる(リスト4)。
model dynamicJun
import Modelica.Constants.pi;
import Modelica.Constants.g_n;
Real theta1;
Real theta2;
Real theta1v;
Real theta1a;
Real theta2v;
Real theta2a;
Real tau1;
Real tau2;
Real h1;
Real h2;
Real g1;
Real g2;
Real x;
Real y;
Real Lg;
Real M11;
Real M12;
Real M21;
Real M22;
Real In;
parameter Real L = 2;
parameter Real m = 1;
parameter Real omg1 = 2*pi;
parameter Real omg2 = 2*pi;
equation
theta1v = der(theta1);
theta1a = der(theta1v);
theta2v = der(theta1);
theta2a = der(theta2v);
Lg = L/2;
In = m*L^2/12;
M11*theta1a + M12*theta2a + h1 + g1 = tau1;
M21*theta1a + M22*theta2a + h2 + g2 = tau2;
M11 = m*Lg^2 + m*L^2 + m*Lg^2 + In + In + 2*m*L*Lg*cos(theta2);
M12 = m*Lg^2 + In + m*L*Lg*cos(theta2);
M21 = m*Lg^2 + In + m*L*Lg*cos(theta2);
M22 = m*Lg^2 + In;
h1 = -m*L*Lg*(2*theta1v + theta2v)*theta2v*sin(theta2);
h2 = m*L*Lg*theta1v^2*sin(theta2);
g1 = -m*g_n*Lg*sin(theta1)-m*g_n*L*sin(theta1)-m*g_n*Lg*sin(theta1+theta2);
g2 = -m*g_n*Lg*sin(theta1+theta2);
x = L*cos(theta1) + L*cos(theta1 + theta2);
y = L*sin(theta1) + L*sin(theta1 + theta2);
theta1 = omg1*time;
theta2 = omg2*time;
end dynamicJun;
リスト4を解析した結果(各関節の必要トルク)を図9に示す。なお、機構の動きは図3の運動学の順問題の結果と同じである。

Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 幾何公差の基準「データム」を理解しよう
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。