次世代TransferJetと自律ロボットで協働型見廻りシステム、伝送速度は5G並み:ロボット開発ニュース
情報通信研究機構とソニーセミコンダクタソリューションズは共同で、自律移動サービスロボットによる協働型見廻りシステムを開発した。免許不要の次世代通信技術「TransferJet X」を利用し、短時間、非接触で巡回データの収集と配信ができる。
情報通信研究機構(NICT)は2021年6月9日、ソニーセミコンダクタソリューションズと共同で、4Kカメラを搭載した自律移動サービスロボットによる協働型見廻りシステムを開発したと発表した。
同システムは、免許不要の次世代TransferJet通信技術「TransferJet X」を利用することで、立ち入り困難で通信インフラ敷設が難しい場所でも、短時間かつ非接触で巡回データの収集と配信ができる。
TransferJet Xは、国際標準規格「IEEE 802.15.3e」をベースとし、無線免許のいらない60GHz帯(ミリ波)を利用する近距離高速無線通信技術。接続に必要な時間は2ミリ秒以下、通信速度は最大13.1Gbpsだ。
同システムでは、見廻り依頼者が無線デバイスから自律移動サービスロボットへ見廻りを依頼すると、付近のロボットが見廻り場所まで移動し、搭載する4Kカメラで撮影を開始する。見廻りが終了すると、ロボットが依頼者の元まで向かい、TransferJet X経由で再生装置へデータを無線伝送し、自動再生する。
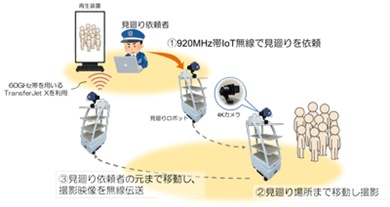 自律移動サービスロボットによる見廻りシステムの例 出典:情報通信研究機構
自律移動サービスロボットによる見廻りシステムの例 出典:情報通信研究機構実証実験では、依頼者から86.8m離れた場所で約1分間撮影し、約10GBのデータを取得。その後ロボットは、移動時間129秒、伝送時間34秒の計163秒で依頼者へデータを届けた。これはデータ転送速度に換算すると514Mbpsで、5Gを用いた技術規格上のデバイス間最大スループット(480Mbps)と同程度の速度に相当する。
また、数百mの範囲内にある2台のサービスロボット間で協調動作し、見廻り場所に近い方のロボットに作業を依頼したり、ロボット同士が待ち合わせをして撮影データを受け渡しできることも確認した。
今後は、オフィス、ホテル、病院、駅や商業施設など、実環境における実用性を検証する予定だ。
関連記事
 10Gbpsを超える超高速近接無線通信を国際標準規格化
10Gbpsを超える超高速近接無線通信を国際標準規格化
TransferJetコンソーシアムは、米国の電気電子学会IEEEにおいて、10Gbpsを超える超高速近接無線通信「IEEE802.15.3e」の国際標準規格化を完了した。4K解像度やVRなどの大容量データを短時間で転送可能にする。 産業向け5Gの実導入は2022年から、ユーザー企業の理解も進む
産業向け5Gの実導入は2022年から、ユーザー企業の理解も進む
IDC Japanが「国内産業向け5G関連IT市場予測」など、ローカル5Gを中心とした調査結果について説明した。パブリック5Gやローカル5Gへの理解が進んでおり、2022年から産業向け5Gの実導入が始まるという共通認識が生まれつつあるという。 ミリ波帯サービス実現の一歩、高速で動く5G通信端末で基地局切り替え実験に成功
ミリ波帯サービス実現の一歩、高速で動く5G通信端末で基地局切り替え実験に成功
NTTドコモは2021年3月31日、時速90km以上で走行する車両に5G通信端末を搭載して、連携する複数基地局を瞬時に切り替える実証実験に成功したと発表した。高速移動中の移動体に対する、安定的な5G通信サービスの実現につながる可能性がある。 威圧しない、威厳がある――セコムの新型警備ロボット「cocobo」のデザイン思想
威圧しない、威厳がある――セコムの新型警備ロボット「cocobo」のデザイン思想
セコムは、新開発のセキュリティロボット「cocobo」を発表した。各種センサーやカメラなどを搭載した自律型警備ロボットで、AI、5Gといった先端技術を活用した巡回警備や点検業務が行える。「公共空間との調和」「威厳と親しみやすさ」を開発コンセプトに掲げ、znug designの根津孝太氏、ロフトワークとともにデザインした。 建築現場用ロボット向けの自律移動システムを開発、AI清掃ロボットに導入へ
建築現場用ロボット向けの自律移動システムを開発、AI清掃ロボットに導入へ
鹿島建設とPreferred Networksは、建築現場用ロボット向けの自律移動システム「iNoh」を開発した。実用化の第1弾として、AI清掃ロボット「raccoon」に搭載し、首都圏の現場に導入を開始している。 製油所向けプラント巡回点検防爆ロボットの実用化に向けて共同開発へ
製油所向けプラント巡回点検防爆ロボットの実用化に向けて共同開発へ
三菱重工業は、プラント巡回点検防爆ロボット「EX ROVR」の実用化に向け、第2世代機の共同開発契約をENEOSと締結した。第2世代機の開発では、マニピュレーターの実装やソフトウェアの改良により、EX ROVRが取得するデータの量と質を向上する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
ロボットの記事ランキング
- 驚異的な演算/運動性能を兼ね備えた次世代犬型ロボ「PUDU D5」シリーズが誕生
- きゅんくんも参加、ロボットスタートがラボ開設
- ROSを使う手順、パッケージとシミュレータの活用
- 「あの現場で動けるロボットはQuinceしかない」〜原発ロボットを開発する千葉工大・小柳副所長(前編)
- なぜロボットにクラウドが必要なのか?
- 保険適用が拡大する手術支援ロボット「da Vinci」、デジタル活用でアプリも投入
- 減速機にアキシャルフラックスモーターを一体化した超偏平アクチュエーター
- PFNが自律移動ロボット子会社のPFRoboticsを設立、アマノから20億円を調達
- NTT東日本など3社が国産ドローンの新会社を設立、まずは農業分野にフォーカス
- 「タチコマ」が2つの姿で実体化、コミュニケーションロボットの社会実装に挑む
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。