
人手不足対策で完全自動化は逆効果、人とロボットの協力をどのように切り開くか:MONOist 2019年展望(3/3 ページ)
協働ロボットに残された課題
ただ、現状の協働ロボットにもまだまだ数多くの課題が存在している。まず、協働ロボットに求められているのは、人と同じスペースで働くことができるために、従来ロボットが使用できなかった領域で使用できる「新たな用途拡大」という点である※)。
※)関連記事:協働ロボット、ロボットシステムに残された課題と未来
しかし一方で、ロボットのインテグレーションを行うロボットインテグレーターの数は不足しており、導入支援が十分に行えない状況だ※)。新用途ということになると活用するユーザー側もロボットに対する知見があるとはいえない場面が多い。そのため、重要になるのが協働ロボットそのものを「簡単に使えるようにする」ということが求められる。
※)関連記事:ロボット活用拡大のボトルネック、ロボットインテグレーターの現実
協働ロボットメーカーも各社がダイレクトティーチングやフローチャート型の作業指示など、さまざな工夫を重ねているが、まだまだ十分とはいえない状況である。2019年はさらに、ティーチングの簡略化やシミュレーションの高度化、アプリでの作業支援など、さらに「シンプル化」への取り組みが広がる見込みだ。
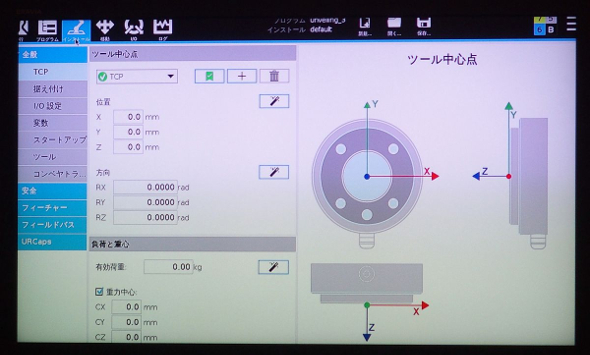 ユニバーサルロボットの操作画面イメージ。各社がシンプル化に取り組んでいる 出典:ユニバーサルロボット
ユニバーサルロボットの操作画面イメージ。各社がシンプル化に取り組んでいる 出典:ユニバーサルロボット2つ目が「人と一緒に働くのに最適な形」という点である。人と一緒に働くことを考えると、例えば、設置スペースや作業スペースなどもできる限りコンパクトに抑えられることが望ましい。一方で、産業用ロボットの派生で作られた協働ロボットは用途によってはオーバースペックとなっているものも多い。そういう意味では、現状の協働ロボットはデザイン性なども含めて設計面でもさらなる発展の余地があるといえる。2019年も新たなカタチの協働ロボットが登場することが期待されている。
3つ目が、周辺システムの課題である。ロボットは扱うものによって最適なハンドが必要になる。この開発を誰がやるのかというところも協働ロボットの課題である。先述したように、協働ロボットが新規用途でのロボットの使用を想定していることを考えれば、ハンド開発にもコストや負担はかけられない。「人の手」のような何にでも使用できる汎用性を持ったハンドが理想だが、現状では難しく、この領域には発展の余地がある。合わせてロボットが動作するための画像認識のためのカメラや認識システムなどもAIなどを組み合わせ、ユーザー負荷を低減する開発などが進んでおり、これらの発展も期待されている。
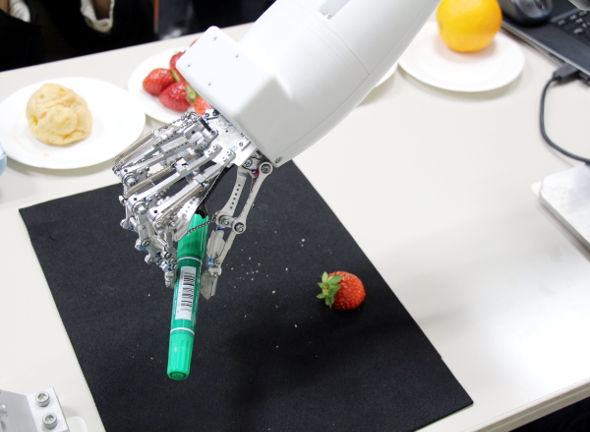 NEDOとダブル技研、都立産業技術高専が開発した、「からくり」を採用したロボットハンド。
NEDOとダブル技研、都立産業技術高専が開発した、「からくり」を採用したロボットハンド。関連記事
 協働ロボット、ロボットシステムに残された課題と未来
協働ロボット、ロボットシステムに残された課題と未来
協働ロボットを現場で活用するのにどのような工夫が必要か――。ロボット技術の総合展示会「2017国際ロボット展」では、ロボットメーカーおよびユーザー企業によるパネルディスカッション「ロボットフォーラム2017」が実施され、協働ロボットの意義について語った。 機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
機械は人の仕事を奪わない、“人とロボットがともに働く現場”が拡大へ
2016年は人工知能関連技術が大きな注目を集めて「機械が人間の仕事を奪う」という議論が大いに盛り上がりを見せた。こうした一方で2017年には「現場」において、こうした動きと逆行するように見える「人とロボットが協力して働く世界」が始まりを迎える。 いまさら聞けない産業用ロボット入門〔前編〕
いまさら聞けない産業用ロボット入門〔前編〕
日本は「ロボット大国」とも呼ばれていますが、その根幹を支えているのが「産業用ロボット」です。それは世界の産業用ロボット市場で圧倒的に日本企業がシェアを握っているからです。では、この産業用ロボットについてあなたはどれくらい知っていますか? 今やあらゆるモノの製造に欠かせない産業用ロボットの本質と基礎を解説します。 製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
製造現場での普及を2倍に、ロボット新戦略が目指すロボットと共に働く未来
日本政府が主催する「ロボット革命実現会議」は、ロボット活用の技術的および規制面でのロードマップを示した「ロボット新戦略」を発表した。本稿では、この新戦略の中で示されている「モノづくり」分野への取り組みにフォーカスし、その内容を紹介する。 生産性3倍、リードタイムは6分の1、安川電機の新スマート工場が示すもの
生産性3倍、リードタイムは6分の1、安川電機の新スマート工場が示すもの
安川電機は2018年7月に稼働開始したスマート工場「安川ソリューションファクトリ」を報道陣に公開した。生産スピード3倍、生産リードタイム6分の1、生産性3倍を実現したという同工場の取り組みを紹介する。 安川電機が考える人協働ロボットの課題と可能性
安川電機が考える人協働ロボットの課題と可能性
安川電機の人協働ロボット「MOTOMAN-HC10」は市場投入後1年を経過した。その手応えを開発担当者に聞いた。 オムロンが描く真の人協働とは、重要なのは“ロボットではない部分”
オムロンが描く真の人協働とは、重要なのは“ロボットではない部分”
オムロンは、ロボットの国際大会「World Robot Summit 2018」(2018年10月17〜19日、東京ビッグサイト)において、AGVと協働ロボットを組み合わせて円滑に部材などをピックアップする物流施設をイメージしたデモを披露した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。