ロボットスキンに応用可能な触覚動作を認識するセンサーシステム:ロボット開発ニュース
NEDOとJAPERAは、高精細/高感度な圧力センサーと、これをロボット・スキンに応用するシステムを開発した。なでる、たたく、もむなどのさまざまな触覚動作をロボットに認識させることができる。
新エネルギー・産業技術総合開発機構(NEDO)と次世代プリンテッドエレクトロニクス技術研究組合(JAPERA)は2017年10月2日、高精細/高感度な圧力センサーと、これをロボットスキンに応用するシステムを開発したと発表した。同システムにより、なでる、たたく、もむなどのさまざまな触覚動作をロボットに認識させることができ、ロボットをヒトと同じ感覚を持つように反応させることができる。
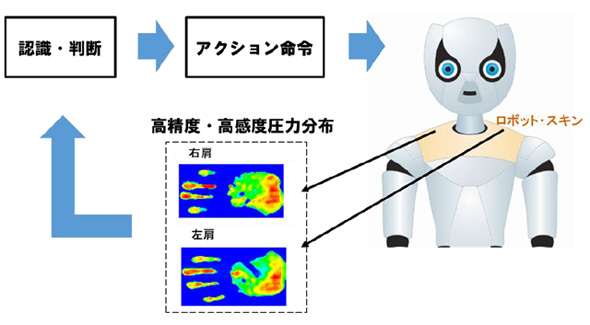 ロボットスキンをヒト型ロボットに搭載したシステムのイメージ 出典:NEDO
ロボットスキンをヒト型ロボットに搭載したシステムのイメージ 出典:NEDO同システムに用いられる圧力センサーシートは、JAPERAがNEDOの「次世代プリンテッドエレクトロニクス材料・プロセス基盤技術開発」プロジェクトにおいて開発したもの。センシングする各点にスイッチングトランジスタを持つアクティブマトリックス方式を採用し、従来のパッシブマトリックス方式に比べ、センシングする点の密度を高くしても高い階調数を保つことができ、高精細化と高感度化が可能になる。
このアクティブマトリックスの有機薄膜トランジスタは、柔らかなフィルム上に全て印刷プロセスで形成でき、柔らかく面状のセンサーを形成できる。印刷プロセスは、真空プロセスを必要とするフォト・リソプロセスに比べて大幅なプロセス簡略化が期待でき、また、製造施設の省スペース化や使用材料の省資源化が可能となる。材料塗り分けによる多機能化も期待でき、その1つとして同年2月に発表した圧力/温度同時検出シートセンサーの技術による温感の付与も検討しているという。
今回開発した圧力センサーシートはフレキシブルフィルム上に構成したものだが、今後基材フィルムをストレッチャブル素材に替えることで、さまざまな3次元曲面への対応やメディカル用途での応用が期待される。
関連記事
 ロボット開発で注目される「ROS」(Robot Operating System)とは何か
ロボット開発で注目される「ROS」(Robot Operating System)とは何か
ロボットの話題を聞くことが増えたが、判断と制御、駆動を備えたロボットを作るのはかなり骨が折れる。その負担を軽減するフレームワークが「ROS」(Robot Operating System)だ。 ロボットの「触覚」をプリンテッドエレクトロニクスで実現
ロボットの「触覚」をプリンテッドエレクトロニクスで実現
次世代プリンテッドエレクトロニクス技術研究組合は「CEATEC JAPAN 2017」で、プリンテッドエレクトロニクスによる高精度・高感度圧力センサーシートを披露。ロボットに装着して、接触による意思疎通のデモを行った。 世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決
世界初の力触覚制御を実現した双腕ロボット、「固くて柔らかい」矛盾を解決
NEDOと慶應義塾大学は、身体感覚を伝送可能な双腕型ロボット「General Purpose Arm」の開発に成功した。「世界初」とする力触覚に応じた制御により、力加減を調節し多様な作業を柔軟に行えることが最大の特徴。「固くて柔らかい」という矛盾した制御が必要な力触覚はどのように実現されたのか。 触覚を使った屋内ナビゲーションの実証実験を開始
触覚を使った屋内ナビゲーションの実証実験を開始
NTTデータ、NTTデータイタリア、NTTは「触覚を使った屋内ナビゲーション」の実証実験を開始する。触覚刺激による牽(けん)引感覚生成技術と、地磁気を用いたインドアマップ・ナビゲーション技術を組み合わせたもので、振動により直感的な誘導ができる。 ロボットの力加減を調節する集積化触覚センサーの開発に成功
ロボットの力加減を調節する集積化触覚センサーの開発に成功
東北大学は、MEMS技術による3軸力センサーと専用の「センサープラットフォームLSI」とをワンチップ化した集積化触覚センサーを開発した。これにより、ロボットの力加減を適切に調節するために必要な要素が、全て同時に達成できるようになった。 シールのように体に張れる「タッチセンサー」――将来はロボットスキンへ応用も!?
シールのように体に張れる「タッチセンサー」――将来はロボットスキンへ応用も!?
科学技術振興機構(JST)と東京大学は、東京大学大学院 工学系研究科の染谷隆夫教授、関谷毅准教授、マーチン・カルテンブルンナー博士研究員らが、世界最軽量で最薄の電子回路の開発に成功し、タッチセンサーに応用したことを発表した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
ロボットの記事ランキング
- 油圧ならトン単位の力も出せる、ブリヂストンのゴム人工筋肉
- 大工作業を行う協働ロボット、アパート建築で4.5人工を省力化
- トヨタ自動車、第3世代ヒューマノイドロボットを開発
- 驚異的な演算/運動性能を兼ね備えた次世代犬型ロボ「PUDU D5」シリーズが誕生
- ロボットは自律でどこまで戦えるのか――ROBO-ONE auto第2回大会レポート
- 減速機にアキシャルフラックスモーターを一体化した超偏平アクチュエーター
- Pepperを動かす「アプリ」を作ろう〜まずはSDKの基本的な使い方を習得する
- リンゴ自動収穫機のスタートアップに2億7500万円を追加出資
- Pepperが「ボケて」で大喜利素材に
- Amazonギフト券3000円分が当たる――MONOist読者調査
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。