007のテーマを演奏する小型ロボット、救助現場でも活躍:米ソリッドワークスのプライベートイベントより(2/2 ページ)
3.11被災地での実験
社会での実用化に向けて動いている一例として、2011年7月28〜31日に実施した東北大学との共同実験の事例を紹介した。2011年3月11日に起きた東日本大震災で被災した東北大学の校舎(電気系1号館)を調査する実験だ。小型飛行ロボット「ペリカン(Pelican)」のセンサが建物内の様子を逐一捉えてコンピュータにデータを送る。そのデータを基に建物内部の様子を3次元データ化する。
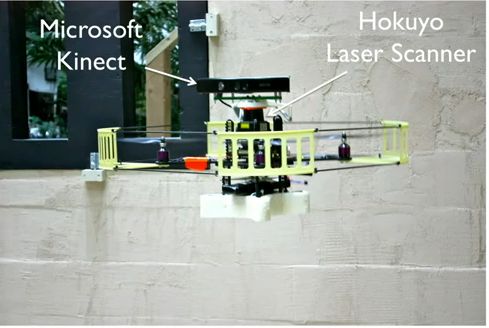 ペリカンに備えるスキャナとKinectセンサ
ペリカンに備えるスキャナとKinectセンサ 輸送ロボットクインスに乗って動くペリカン
輸送ロボットクインスに乗って動くペリカン被災地の建屋は大きな揺れによりもろくなっている。倒壊の恐れがある部分などに人がむやみに近づけない。そのような場合の調査、あるいは救助活動などにおける活躍が期待できる。
監視するユーザーは、小型飛行ロボットが送ってくるデータを基に作られた3次元データのみ閲覧する。またユーザーが「障害物を避けろ」「ここを通って」と逐一指示を出すことはない。
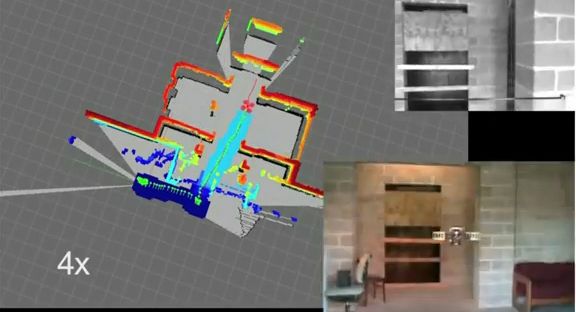
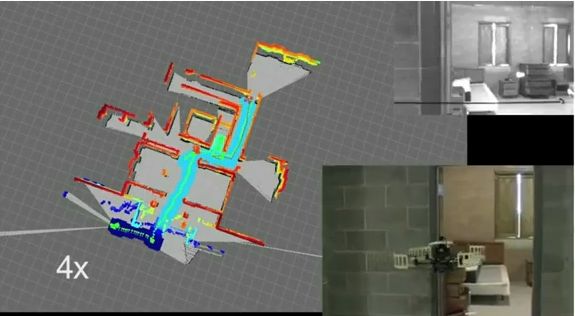
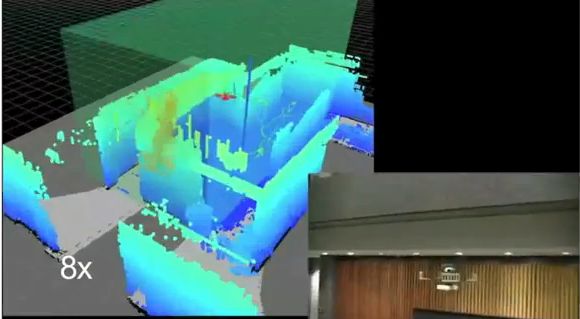 東北大学校舎内の調査を3次元データ化する
東北大学校舎内の調査を3次元データ化するこの小型飛行ロボットの欠点は、バッテリーの持ちがあまりよくないこと。実験当時はその問題を考慮し、途中まで輸送ロボット「クインス(Quince)」に運んでもらって、細かく探知したい場所にたどり着いた時点で降りて飛行する仕組みになっていた。この対策としては、充電ステーションを開発中ということだ。
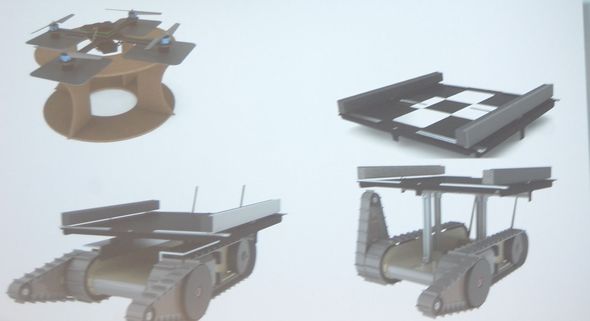 充電ステーションなど現在開発中予定の装置の3次元モデル
充電ステーションなど現在開発中予定の装置の3次元モデル小型飛行ロボットの動作概念
「大抵の無人飛行機は、ロボットではない」とクマール氏はまず前提を説明した。無人とはいっても、その背後にオペレーションする人が存在する。また(ラジコン飛行機のようなおもちゃを除く)一般的な無人飛行機は重たくなりがちで、屋外の飛行を前提としていると指摘した。
一方、同氏が研究する飛行機が「ロボット」と称されるゆえんには、それ自身が知能を持っていることがある。人がオペレーションすることはなく、飛行機が自らの知能により自発的に動き回る。小型飛行ロボットの機体には4個のプロペラとモータを搭載し、そこから生み出される羽の回転力を利用して浮き揚がる。またスキャナーとKinectセンサーを備える。
消費電力は15W程度。ロボットの大きさは全長1m以下で、重さも数kg程度のもので、屋内を飛行できることが特徴だ。軽量小型化は、機動性の向上や消費エネルギーの効率化へとつながる。
このような自律した知能を実現するためには、適切なモーションプランニング(動作の設計)が必要となる。しかしロボットの動きの定義は非常に複雑なものだ。実用的な動きということになれば、立体的でかつある程度自律的にさせたい。また複数の個体を動かしたい場合、それらの処理を全て集中コントロールしようとすれば、ただでさえ重たい立体的な動作の情報量は、集団の大きさに応じてどんどん膨れ上っていく。そのため、解く方程式の量をうまくやり繰りしなければ、おのずとデータは膨大となってしまう。
そこであらかじめ立体的な動きを平面化して表現しておく。つまり定めておきたい走行ルートのポイントをまず平面的に表現して設定しておく。その上で、ロボットが実際に動き回る際に、自身に備えたモーションキャプチャで障害物の様子をリアルタイム探知し、それに基づき自身の知能で計算して軌道修正する。センサとロボットとのやりとりは1秒間あたり20回程度のスピードだという。
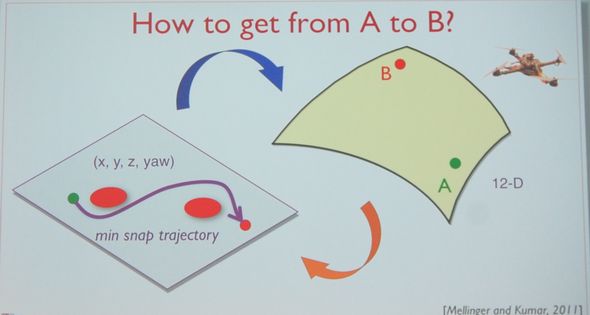 ロボットの動きを平面化する概念
ロボットの動きを平面化する概念ある程度の知能を持ち、自発的に行動する小型飛行ロボットの着想は「自然界から得た」とクマール氏は説明した。その理論をロボットに応用するに当たっては知人の生物学者も協力したという。
例えば地上を歩くアリの集団には特定のリーダーがいるわけではない。それなのに集団で協力しながら食料を運び、巣に向かって進むことが可能だ。お互いが信号を送り合ってはいるが、せいぜい「お互いがぶつからないようにする」ためであって、ほかのアリが一体何匹いるか、群れの中にどんな性格の個体がいるのかどうかまで、いちいち把握できない。また群れを成して空を移動する渡り鳥もそれと似ている。
彼らは個体ごとにある程度の知能を有しているが、あくまでローカルなものであって、お互いがネットワークでつながれて、状況に応じて随時“何か”にコントロールされて動いているわけではない。要は、自分に直接関係する情報の判断能力しかなく、基本的な行動は潜在的本能に基づいて自動実行させられているようなものだ。
「この特性をロボットに持たせよう」とクマール氏は考え、今回の小型飛行ロボットの開発が進められたということだ。
このような開発の成果は、「イノベーション基盤の構築」「ハードウェアとソフトウェアの協調設計」「オープンなアーキテクチャ・プラットフォーム作り」というロボット開発環境における課題へつなげ、その発展に生かしていく。
Copyright © ITmedia, Inc. All Rights Reserved.
メカ設計の記事ランキング
- 6枚刃を搭載した新「ラムダッシュ パームイン」 小型設計と意匠性をさらに追求
- スマホ映像から最短1分で高精細3Dモデル、NECが生成技術を開発
- 弱い部分が1箇所でもあると台無しに、液晶リペア装置の失敗事例
- 使用中に発火、サーキュレーター10万台をリコール
- 図面AIに「動かせる3Dモデル」の生成機能、関節や可動域を自動認識
- 【レベル4】図面の穴寸法の表記を攻略せよ!
- 顧客の要望をうのみにするな 分析まひを抜け出す「超上流のプロトタイピング」
- 幾何公差の基準「データム」を理解しよう
- 新型コロナで深刻なマスク不足を3Dプリンタで解消、イグアスが3Dマスクを開発
- Autodesk Fusionで設計した超小型衛星「PRELUDE」が軌道投入、初期運用へ







![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。