
バイラテラルギア活用で人の触覚再現、小型サイズで広範囲のトルク制御機能:FAニュース
日本精工(NSK)は、触覚伝達装置向け減速機としてバイラテラルギアを開発した。
日本精工(NSK)は2025年10月23日、触覚伝達装置向け減速機としてバイラテラルギアを開発したことを発表した。
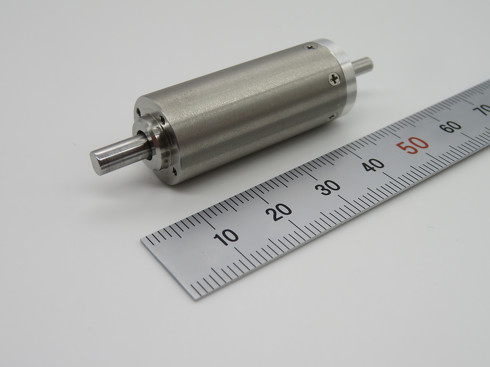 開発したバイラテラルギア 出所:日本精工
開発したバイラテラルギア 出所:日本精工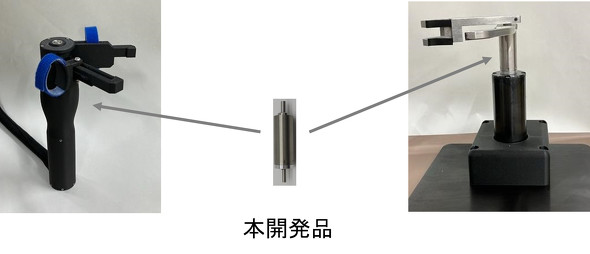 開発品を搭載した触覚伝達装置の例(左:手術操作用ハプティックシステム、右:搬送ロボット用力検知グリッパ) 出所:日本精工
開発品を搭載した触覚伝達装置の例(左:手術操作用ハプティックシステム、右:搬送ロボット用力検知グリッパ) 出所:日本精工人手不足などを背景として、作業の自動化や機械の遠隔操作のニーズが高まっている。その中で重要なのが、サービスロボットのハンド部分などにおける触覚の伝達だ。例えば製造現場では多様な対象物を把持、搬送するロボットハンド、医療機関では手術器具の遠隔操作において、人間の触覚を再現する必要がある。
ロボットハンドに収まる手のひら程度のサイズで、人間の繊細な触覚を再現するためには、コンパクトでありながら幅広いトルクを制御する触覚伝達装置が必要となり、それに対応した減速機の開発が課題となっている。従来技術で開発された減速機は、大型サイズであれば幅広いトルクに対応できるが、小型になると高トルクの駆動や繊細な制御が実現できない、という問題があった。そのため、小型でありながら広範囲のトルク制御を両立する減速機が求められている。
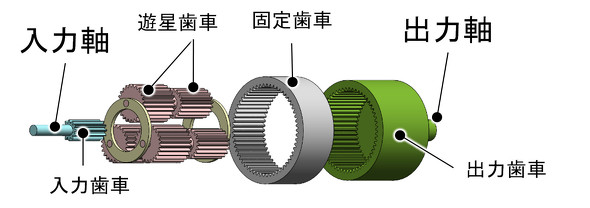 バイラテラルギアの内部構造 出所:日本精工
バイラテラルギアの内部構造 出所:日本精工そこでNSKでは、入力軸と出力軸の双方向から高効率で力と位置を伝達する減速機であるバイラテラルギアを、触覚伝達装置向け減速機として開発することで、小型化と広範囲のトルク制御の両立に成功した。
このバイラテラルギアは、横浜国立大学の特許技術を用いた遊星歯車を中心に構成されている。NSKと横浜国立大学は2021年から、バイラテラルギアの社会実装に関する共同研究を行ってきた。
バイラテラルギアを触覚伝達装置向け減速機として小型サイズで開発するに当たっては技術課題があった。バイラテラルギアの構造上、遊星歯車と固定歯車/出力歯車のかみ合いにおいて大きな反力が発生。遊星歯車を支持する軸受として、一般的に採用されている滑り軸受を使用した場合、その軸受の摩擦が増大し、動力の伝達効率が悪化する。
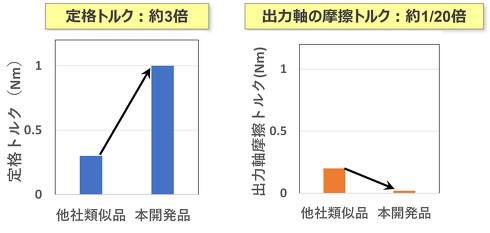
 小型サイズでありながら大きなトルクで駆動可能 出所:日本精工
小型サイズでありながら大きなトルクで駆動可能 出所:日本精工NSKは、遊星歯車を支持する軸受に玉径0.5mmという小径の転がり軸受を採用し、軸受周辺の設計を最適化した。これにより、限られたスペースでも反力を受け止め、歯車の回転を支持し、伝達効率を保つことができるようになった。
同社によれば、同等サイズの市販の減速機の中では最も大きなトルク駆動に対応でき、他社類似製品(波動歯車)に対しては安定的に駆動できる最大トルク(定格トルク)は約3倍、その出力軸を動かすのに必要な力(出力軸の摩擦トルク)は約20分の1になったという。
 大小幅広いトルクの制御が可能 出所:日本精工
大小幅広いトルクの制御が可能 出所:日本精工なお、今回の開発品は、「2025国際ロボット展(iREX 2025)」(同年12月3〜6日、東京ビッグサイト)に出展し、市場ニーズの調査や共同開発先の探索を実施する。2026年度にはサンプルを出荷し、2027年度の商品投入を見込んでいる。
関連記事
 踊り場を迎えるサービスロボット【前編】〜なぜ導入が進まないのか〜
踊り場を迎えるサービスロボット【前編】〜なぜ導入が進まないのか〜
転換点を迎えるロボット市場の現状と今後の見通し、ロボット活用拡大のカギについて取り上げる本連載。第2回は、サービスロボットをテーマに、サービス業の特徴に触れながら、サービスロボットのポテンシャルと導入の拡大に向けた課題を解説する。 踊り場を迎えるサービスロボット【後編】〜現場への導入を進める4つの施策とは〜
踊り場を迎えるサービスロボット【後編】〜現場への導入を進める4つの施策とは〜
転換点を迎えるロボット市場の現状と今後の見通し、ロボット活用拡大のカギについて取り上げる本連載。第3回は、現場へのサービスロボットの導入を進めるための4つの施策について解説する。 軸受の技術が揚げ油を救う! NSKが食品油の劣化を防ぐフィルターの量産開発完了
軸受の技術が揚げ油を救う! NSKが食品油の劣化を防ぐフィルターの量産開発完了
ベアリングメーカーのNSKが食用油の寿命を延ばすフィルターを開発。ベアリング開発で培った技術を応用し、揚げ物調理油の寿命を延ばすろ過機向けフィルターの量産開発を完了した。 NSKが「業界初」となる軸受のカーボンフットプリント報告書を公表
NSKが「業界初」となる軸受のカーボンフットプリント報告書を公表
日本精工は、本年3月に開発した鉱山設備向け軸受のカーボンフットプリント自主算定値を「CFP算定報告書」にて7月28日に公表した。業界で初めて軸受のCFP算定報告書を公開した。 全方向移動ユニットの高荷重化に向け共同開発プロジェクトを加速
全方向移動ユニットの高荷重化に向け共同開発プロジェクトを加速
日本精工は、人機一体と共同で取り組む「アクティブキャスタPalGo 高荷重タイプ」の開発プロジェクトについて発表した。開発品は「2025国際ロボット展」で共同展示する。 NSKが状態監視ソリューション拡充 設備診断専門家とAIが支援、工作機械も適用へ
NSKが状態監視ソリューション拡充 設備診断専門家とAIが支援、工作機械も適用へ
日本精工(NSK)はこれまで提供してきた状態監視ソリューションを2024年10月より拡充する。同ソリューションは「第32回日本国際工作機械見本市(JIMTOF 2024)」に出展する。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。