リアルハプティクス技術搭載の脊椎手術用骨ドリルを開発:医療機器ニュース
慶應義塾大学は、リアルハプティクス技術を実装した、脊椎手術用ドリルを開発した。リアルハプティクス搭載の骨ドリルを利用した場合、手術経験の浅い外科医でも正確かつ安全な手術が可能になることを実証した。
慶應義塾大学は2023年3月13日、リアルハプティクス技術を実装した、脊椎手術用ドリルを開発したと発表した。手術経験の浅い外科医でも、正確かつ安全な手術が可能になることを実証した。神奈川県立産業技術総合研究所、横浜国立大学、モーションリブ、日本メドトロニックとの共同研究による成果だ。
リアルハプティクスとは、ロボットを人間が操作して現実の物体に接触した際の力や動きをデータ化し、リアルタイムに双方向へ伝送することで感触を再現する。力触覚機能を機械に実装することで、力加減の調整や力触覚の長距離伝送が可能となる。
今回の研究では、リアルハプティクス技術を応用し、骨ドリルに貫通検知機能を搭載した。3人の脊椎外科医が貫通検知機能搭載の骨ドリルと搭載なしの骨ドリルを用いて、ミニブタの椎弓(脊椎)を削って脊髄近くまで貫通させ、ドリル先端が貫通検知するまでの時間と貫通後にドリル先端が進行した距離を比較検証した。
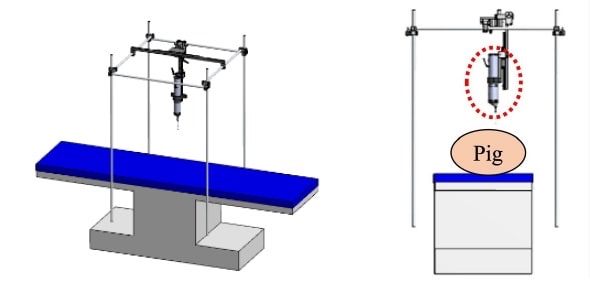 実験時のドリル模式図 出所:慶應義塾大学
実験時のドリル模式図 出所:慶應義塾大学その結果、貫通を検知するまでの時間と貫通検知後にドリルが停止するまでに進んだ距離は、通常の骨ドリルよりもリアルハプティクス搭載骨ドリルで有意に短かった。通常の骨ドリルに比べ、リアルハプティクス搭載骨ドリルを利用した場合の検知時間と距離は、ともに10分の1以下となった。

3人の外科医間では、貫通検知までの時間および検知後から停止までに進んだ距離に有意な差はなかった。このことから、経験の浅い外科医でも、正確に操作できることが示唆された。
脊椎領域の手術では、骨ドリルを脊椎神経や脈管系の近くで使用するため、難易度の高い操作が求められる。リアルハプティクス技術の実装により、安全性の高い手術方法の確立が期待される。
 脊椎手術で使用する骨ドリル(日本メドトロニック社 HP より抜粋) 出所:慶應義塾大学
脊椎手術で使用する骨ドリル(日本メドトロニック社 HP より抜粋) 出所:慶應義塾大学- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- スマホ認証機構と資格確認用PCを内蔵した新型「顔認証付きカードリーダー」を発表
- 日本人の骨格に合わせて設計、上腕骨折用の治療システムを提供開始
- 抗がん剤調製から投与までを安全に、テルモが閉鎖式システムの新製品を発売
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 非接触の3D計測で早期発見、脊柱側弯症の学校検診をデジタル化
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 目が不自由な人の歩行をAIが音声で支援、歩行補助デバイス開発へ
- 病院のセキュリティ対策をWebで可視化、最新ガイドラインにも対応
関連記事
 日常的な外部刺激で、肌の潤いに必要な結合型セラミドが減少
日常的な外部刺激で、肌の潤いに必要な結合型セラミドが減少
大正製薬は、ヒト三次元培養表皮を用いて、結合型セラミド量と肌バリア機能の評価系を構築した。これを用いて、肌の潤いに必須な結合型セラミドが、紫外線など肌が日常的に受ける外部刺激によって減少することを明らかにした。 ヒト常在性ビフィズス菌が消化管粘液のムチンを分解する機構を解明
ヒト常在性ビフィズス菌が消化管粘液のムチンを分解する機構を解明
京都大学は、ヒト常在性ビフィズス菌Bifidobacterium bifidum由来の酵素スルフォグリコシダーゼについて、腸内細菌の栄養源となるムチン糖鎖を分解するメカニズムを明らかにした。 カテーテルを通じて留置する、低侵襲の肺動脈弁システムを発売
カテーテルを通じて留置する、低侵襲の肺動脈弁システムを発売
日本メドトロニックは、低侵襲の肺動脈弁専用デバイス「Harmony 経カテーテル肺動脈弁システム」を発売した。先天性心疾患の術後に起こる肺動脈弁逆流症の患者に対し、カテーテルを通じて肺動脈弁を留置する専用デバイスだ。 データ駆動と仮説思考の両輪が強み、アステラスの経営DXアナリティクス
データ駆動と仮説思考の両輪が強み、アステラスの経営DXアナリティクス
アステラス製薬が経営のDXにおけるアナリティクスの活用について説明。不確実性が高い一方で大きな投資が必要になる製薬業界で勝ち抜くために、研究開発プロジェクトへの投資判断を支援するシミュレーションなどに役立てているという。 脂質解析の統合プラットフォーム開発に向け、共同ラボを開設
脂質解析の統合プラットフォーム開発に向け、共同ラボを開設
島津製作所、九州大学、かずさDNA研究所は、島津製作所本社の研究開発棟に、「脂質解析統合プラットフォーム」開発の拠点となる「Auto Biomolecular analysis Systematization Laboratory」を開設した。 協働ロボットで心身のコリを解きほぐす、熟練指圧師の腕を力覚センサー活用で再現
協働ロボットで心身のコリを解きほぐす、熟練指圧師の腕を力覚センサー活用で再現
青山学院大学 理工学部の知技能ロボティクス研究室は「Careテクノロジー東京'23 第6回次世代介護テクノロジー展」において、協働ロボットなどを活用した「ウェルビーイング増幅マッサージシステム」を展示した。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 気温45℃でも15℃を維持、冷却性能が1.6倍になった水冷ウェアを開発
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- 「記憶があるのに思い出せない」はなぜ? 脳の神経活動のゆらぎが関係か
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。