ROSとフォトリアルなシミュレーター「Isaac Sim」を連携させる:ROSを使ってロスなくロボット開発(後編)(4/4 ページ)
ROS_Bridgeで提供されるROSトピック
Isaac Simが対応しているROSトピックは他にもある。そのいくつかを紹介しておこう。いずれもROSモジュール配置、オブジェクト連携という共通の手順で実行できる。
Cameraモジュール
ROSとシミュレーターを連動させて、アームロボットの物体認識に活用する方法を紹介したが、Isaac Simのシミュレーション画像をROS側で使用できるROS_Cameraモジュールも用意されている。
- メニューから“Create>ROS>Camera”を選択。StageにROS_Cameraオブジェクトが追加される
- ROS_Cameraオブジェクトを選択した状態で“Details”タブの“Other>rgbEnabled”にチェックを入れる
- ツールから再生をクリック。ビューポートと同じ画像が“/rgb”トピックとしてpublishされる。“/depth”情報をpublishしてRVizの「Image」で可視化できる他、セグメンテーションやラベルも出力することができる
【訂正】ROS_Cameraモジュールの利用プロセスに関する説明に不足があったので項目2.を追加しました
 Isaac Simのカメラ情報をRViz上に表示
Isaac Simのカメラ情報をRViz上に表示LiDARモジュール
レーザー距離センサーであるLiDARのシミュレーションとROSトピックのpublishができる。
- メニューから“Create>Isaac>Sensor>Lidar”を選択。ステージにLidarオブジェクトが追加される
※)Lidarシミュレーションを行うオブジェクト - メニューから“Create>Isaac>ROS>Lidar”を選択する。ステージにROS_Lidarオブジェクトが追加される
※)ROSトピックをpublishするオブジェクト - Stageで「Lidar」を選択し、Detailsで“drawLidarLines”にチェックを入力。レーザーの線が描画される。3Dギズモで移動可能で、アームロボットのパーツの子階層に入れると動きが連動する。RVizの「LaserScan」で可視化できる
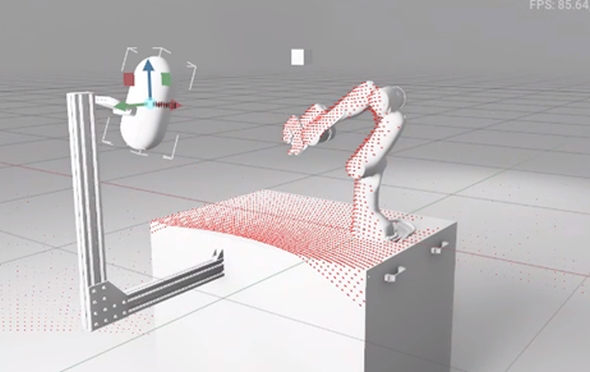 Isaac Simによる3D LiDARのシミュレーション
Isaac Simによる3D LiDARのシミュレーション
シミュレーションの活用
Isaac Simは、ROS_Bridgeを使用することで、GUIだけで操作できる簡単なROS連携を行えるのはここまで紹介した通りだ。さらに、Pythonでプログラムを作成することもでき、「MoveIt!」経由でピッキングを行ったり、「LiDAR SLAM」と連携してマップを作成したりといった応用も可能である。リアルなレンダリングを生かしてVisual SLAM用の動画を生成するなどの用途も考えられる。
ROSはトピックの疎結合で構成しているため、ロボットへの入出力トピックをつなぐことができればシミュレーターの変更もそれほど困難ではない。Isaac Simのような、シミュレーターとしてのレンダリングの美しさや物理エンジンの精細さなどさまざまな特徴を生かすことができれば、シミュレーションの応用範囲を拡大できるだろう。
最後に
リリースから10年が経過し、ROSは研究機関や製造、商用分野まで幅広く活用されるプラットフォームに成長した。用途の多様化に伴い、シミュレーターも多彩な機能が求められるようになるだろう。Gazeboが多機能化する、用途に特化したシミュレーターが登場する、などさまざまな可能性が考えられる。
本連載で紹介したように、ROS対応のシミュレーターは複数登場している。疎結合で構成されているためシミュレーターを変更できるというROSの強みを、ぜひ体験していただきたい。(連載完)
筆者プロフィール
富士ソフト AI・ロボット開発 R&Dチーム
富士ソフトでAI・ロボット開発の調査研究を主務として、最新技術の調査・社内外へのセミナー等に対応し、AI・ロボット開発の最新技術の習得および普及のため活動している。
関連記事
- ≫連載「ROSを使ってロスなくロボット開発」バックナンバー
 ロボット開発プラットフォーム「ROS」はどのように進化してきたのか
ロボット開発プラットフォーム「ROS」はどのように進化してきたのか
ロボットの開発に広く利用されるようになっているロボット開発プラットフォーム「ROS(Robot Operating System)」の活用について解説する本連載。今回は、ROSがオープンソースソフトウェアとしてどのように進化してきたのについて紹介する。 ROSとシミュレーターの連携が生み出す新たな可能性
ROSとシミュレーターの連携が生み出す新たな可能性
ロボットの開発に広く利用されるようになっているロボット開発プラットフォーム「ROS(Robot Operating System)」の活用について解説する本連載。今回は、「ROSの活用シーンとしてのシミュレーターとの連携」をテーマに、ロボット開発におけるシミュレーターの重要性や、ROSと連携可能なシミュレーターなどについて解説する。 ロボット開発で注目される「ROS」(Robot Operating System)とは何か
ロボット開発で注目される「ROS」(Robot Operating System)とは何か
ロボットの話題を聞くことが増えたが、判断と制御、駆動を備えたロボットを作るのはかなり骨が折れる。その負担を軽減するフレームワークが「ROS」(Robot Operating System)だ。 ロボットに使われる分散処理、なぜ「ROS」が好まれるのか
ロボットに使われる分散処理、なぜ「ROS」が好まれるのか
ロボットの制御には集中管理よりも分散処理の方が都合が良く、さまざまなものが登場しているが、その中で一番有名なのが「ROS(Robot Operating System)」である。ではなぜROSが有名なのか。 ROSを使う手順、パッケージとシミュレータの活用
ROSを使う手順、パッケージとシミュレータの活用
ロボット開発に有用とされるROSだが、習得には対応ロボットを入手した方が手っ取り早い。利用開始までの手順と、併用したいツールやデバッガも紹介する。
Copyright © ITmedia, Inc. All Rights Reserved.
組み込み開発の記事ランキング
- “Hello, World”と「Lチカ」の共通点
- インフィニオンのヒューマノイド向け半導体戦略、2050年に3億台の市場を捉える
- サブ1nm半導体チップ技術を発表、性能最大50%向上
- Terra Drone、屋内点検用ドローン運用チームを熊本県の被災地へ派遣
- AIエージェントが車載アプリを動的に生成、イーソルがAIDVに向けた実験場を披露
- フィジカルAI時代のロボティクス新標準、安全性は「後付け」でなく「設計の核心」
- 富士通からC/C++およびJava対応のソースコード解析ツールの資産を取得
- MediaTek製SoCを搭載するSOMの事業を拡大、エッジAI開発の支援に向け
- “3つの頭脳”で80TOPSの処理性能を実現 AMDが語る「次世代AIチップ」戦略
- 上面放熱構造により高放熱と高耐圧を両立したSiC-MOSFETの新パッケージ
コーナーリンク



![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。