ロボットに3Dの“目”を持たせて品質検査を自動化、リンクウィズの挑戦と課題:羽田卓生のロボットDX最前線(2)(2/4 ページ)
» 2021年03月02日 14時00分 公開
[Mira Robotics 取締役COO 羽田卓生,MONOist]
3Dスキャナーで実現する3つの機能
吹野氏はL-QUALIFYを開発した過程を振り返り「3Dスキャナーの急速な高性能化が、外部環境を認識するロボットシステムを実現する土壌を作った。センシングデバイスの進化が、産業用ロボットの用途を拡大しつつある」と語った。

そもそも3Dスキャナーは、立体物の形状をレーザー照射やセンサーによる接触といった手法で測定して、3次元(X、Y、Z軸)の座標データ(点群データ)を取得するというものだ。この点群データを用いることで、さまざまな解析が可能になる。
具体的にL-QUALIFYでは、以下のような解析が行える。
1つ目は「3D形状比較機能」だ。正しく、溶接ができている部分は緑色、盛り上がり過ぎていると赤色、逆に基準より標高が低いと青色に表示される。わずかな高さの違いも3Dスキャンで見分けられるようになっている。
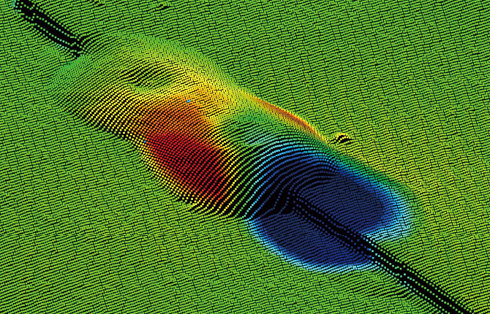 「3D形状比較機能」のイメージ画像。アーク溶接の品質を確認した結果の3Dデータを想定した*出典:リンクウィズ
「3D形状比較機能」のイメージ画像。アーク溶接の品質を確認した結果の3Dデータを想定した*出典:リンクウィズ2つ目は「ホール認識機能」である。座標情報だけでなく、製品に空いている穴の径の大きさや中心位置の正確性を確認できる。
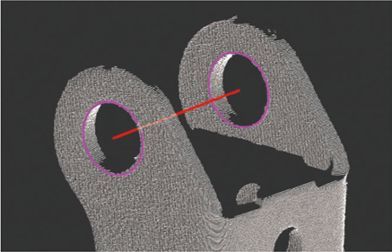 「ホール認識機能」のイメージ画像。穴同士の中心位置が正確かを確認する*出典:リンクウィズ
「ホール認識機能」のイメージ画像。穴同士の中心位置が正確かを確認する*出典:リンクウィズ3つ目は「在荷確認機能」。ねじ穴に正しくねじが収まっているかを確認する。ねじが正確にはまっていなければ、当然、その箇所だけ点群データが空白化する。このため、マスターデータに登録した正常時のデータと比べると点の数が著しく少なくなり、そうした箇所を「(ねじのはまっていない)穴が残っている」とシステムは判定する。
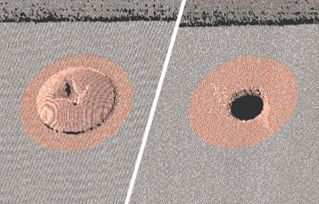 「在荷確認機能」のイメージ画像。点群データの量で穴の位置を確認する*出典:リンクウィズ
「在荷確認機能」のイメージ画像。点群データの量で穴の位置を確認する*出典:リンクウィズCopyright © ITmedia, Inc. All Rights Reserved.
Special ContentsPR
特別協賛PR
スポンサーからのお知らせPR
Special ContentsPR
Pickup ContentsPR
Factory Automationの記事ランキング
- 令和8年熊本地震による工場への影響まとめ
- 異例ヒット? 使い勝手にこだわったオムロンの“オープンな”IO-Linkマスター
- マツダが挑む設備保全DX、AIやIoTで自動車工場内火力発電所の現地点検ゼロへ
- いざ「Re:Nissan」実現へ、日産栃木工場が挑んだ「生産体制の比例化」
- 10年タイで暮らした自分が4年ぶりに現地を訪れたら……
- 機械業界の他社けん制力ランキング2025発表
- データだけ見ても人は動かない ヤマ発製造DXの失敗が生んだ現場サイエンティスト
- 自律走行ロボット第2世代 連続稼働時間3.6倍、他社製品との連携も可能
- 判定はエッジAIで完結/既存カメラをAI化、TDKの産業用ソリューション
- 次なる産業革命へ、トップはかく語りき NVIDIA/富士通/ファナック/安川/川重
Special SitePR
コーナーリンク




あなたにおすすめの記事PR
![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。