柔らかい人工筋肉のダイナミクスを用いて高精度の長さ推定に成功:医療機器ニュース
東京大学とブリヂストンは、空気圧アクチュエーターに基づいた人工筋肉について、人工筋肉のダイナミクスと機械学習法を組み合わせることで、加圧駆動時にリアルタイムで高精度に長さが推定できることを示した。
東京大学は2020年5月15日、ブリヂストンと共同で、空気圧アクチュエーターに基づいた人工筋肉について、加圧駆動時にリアルタイムの高精度な長さ推定を可能にしたと発表した。人工筋肉の柔らかさに起因するダイナミクスと、リザバーコンピューティングと呼ばれる機械学習の手法を組み合わせた。
ブリヂストンでは、ゴムチューブと繊維からなるシンプルな構造のマッキベン型人工筋肉の開発に取り組んでいる。この人工筋肉は、軽量でフレキシブルなソフトアクチュエーターであり発生力も高いが、アクチュエートした際に非線形ならびにヒステリシスを伴う応答を示す。そのため、柔らかい人工筋肉の長さ推定にも、堅いレーザー変位計などを取り付けて計測することが必要だ。

研究チームは、この人工筋肉に加える圧力とその結果として得られるゴム材質の抵抗値を用いることで、レーザー変位計の出力をリザバーコンピューティングに基づいた機械学習機にエミュレート(模倣)できることを示した。学習精度は実際のレーザー変位計の観測誤差と同程度であり、人工筋肉にかかる負荷の条件が急激に変化しても、ある程度頑健に維持された。
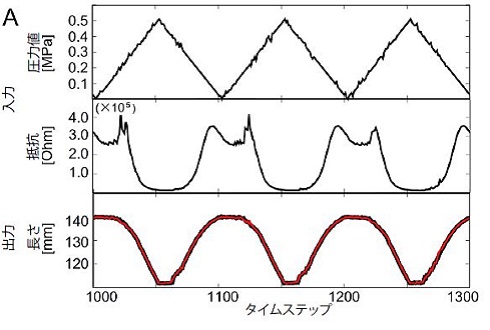 周期的に加圧した際の長さ推定の例 出典:東京大学
周期的に加圧した際の長さ推定の例 出典:東京大学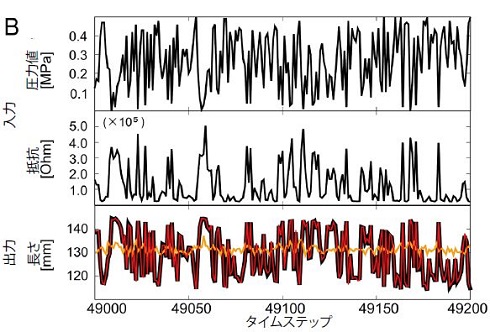 ランダムに加圧した際の長さ推定の例 出典:東京大学
ランダムに加圧した際の長さ推定の例 出典:東京大学今回の成果により、柔らかいデバイスから堅いセンサーなどの装置を取り外せる可能性が示された。今後、歩行アシストや災害現場などでの作業援助など、人工筋肉を活用したウェアラブルデバイスへの応用に期待できるとしている。
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- スマホ認証機構と資格確認用PCを内蔵した新型「顔認証付きカードリーダー」を発表
- 日本人の骨格に合わせて設計、上腕骨折用の治療システムを提供開始
- 抗がん剤調製から投与までを安全に、テルモが閉鎖式システムの新製品を発売
- 大腸がんを低侵襲に治療できるESD、オリンパスが内視鏡ロボット技術で容易に
- 非接触の3D計測で早期発見、脊柱側弯症の学校検診をデジタル化
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 目が不自由な人の歩行をAIが音声で支援、歩行補助デバイス開発へ
- 病院のセキュリティ対策をWebで可視化、最新ガイドラインにも対応
関連記事
 油圧ならトン単位の力も出せる、ブリヂストンのゴム人工筋肉
油圧ならトン単位の力も出せる、ブリヂストンのゴム人工筋肉
ブリヂストンは、「Japan Robot Week 2018」において、アシストスーツや歩行トレーニング装置などに最適な空気圧式ゴム人工筋肉を展示した。 「一家に一台、マッスルスーツ」、イノフィスが10万円台のパワードスーツを発売
「一家に一台、マッスルスーツ」、イノフィスが10万円台のパワードスーツを発売
イノフィスは2019年9月24日、パワードスーツの新製品「マッスルスーツ Every」を同年11月1日から発売すると発表した。 初期費用の安さがウリ、東京理科大発ベンチャーの「マッスルスーツ」
初期費用の安さがウリ、東京理科大発ベンチャーの「マッスルスーツ」
イノフィスは、「第1回 工場設備・備品展」(2019年2月6〜8日、東京都江東区・東京ビッグサイト)で、動作補助設備「マッスルスーツ」を展示した。イノフィスは2013年に設立された東京理科大学発のベンチャー企業で、現在は介護福祉用途での動作補助器具『マッスルスーツ』を開発、販売している。 人工神経接続システムを用いて、まひした手を動かすことに成功
人工神経接続システムを用いて、まひした手を動かすことに成功
京都大学は、人工神経接続システムを用いて、手の運動機能がない脳領域に運動機能を持たせることに成功した。システムを介して脳の信号をまひした筋肉に伝達したところ、10分程度でシステムに適応し、手を自在に動かすことができた。 CASE時代のタイヤに必要なモノづくりとは、ブリヂストンが取り組むスマート工場
CASE時代のタイヤに必要なモノづくりとは、ブリヂストンが取り組むスマート工場
CASEなどで変化する自動車の姿に合わせ、タイヤにも変革の波が訪れている。新たな時代にふさわしい工場の在り方はどういうものになるのか。タイヤ大手のブリヂストンが取り組むスマートファクトリーへの取り組みについて、ブリヂストン 執行役員 タイヤ生産システム開発担当 國武輝男氏に話を聞いた。
関連リンク
Copyright © ITmedia, Inc. All Rights Reserved.
医療機器の記事ランキング
- 1分間隔で日常生活下の血圧を測定できるプログラムを発売
- 医療文書の作成時間を30分から5分へ、生成AIで現場の業務効率化
- アトピーのかゆみや症状に差が出る理由、T細胞受容体の違いにあり
- NTTが養殖飼料向け珪藻を育種、DHAなど5種の脂肪酸が1.8倍に
- 血液中のがんマーカーを基準値の1000分の1濃度で計測、数分での検査が可能に
- 肌のキメには“凸凹”が必要だった! ヒトの皮膚再現モデルを富士通が開発
- 花王が新たな保湿技術を構築、周囲の水分を引き寄せてうるおい続く
- 0.02mmの極薄フィルムを採用した放射線治療用シールを発売
- 日本人の骨格に合わせて設計、上腕骨折用の治療システムを提供開始
- 「記憶があるのに思い出せない」はなぜ? 脳の神経活動のゆらぎが関係か
コーナーリンク




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。